- Bluetooth машинка на Arduino — схема и программа для управления двумя моторами
- Шаг 1. Комплектующие
- Шаг 10. Приложение для смартфона
- #include <AFMotor.h> AF_DCMotor motor1(1); AF_DCMotor motor2(2); void setup() { Serial.begin(9600); motor1.setSpeed(200); motor2.setSpeed(200); } void loop() { if(Serial.available() > 0) { int command = Serial.read(); if(command == 'F') { Serial.print("Forward"); motor1.run(FORWARD); motor2.run(FORWARD); } if(command == 'B') { Serial.print("Reverse"); motor1.run(BACKWARD); motor2.run(BACKWARD); } if(command == 'L') { Serial.print("Left"); motor1.run(BACKWARD); motor2.run(FORWARD); } if(command == 'R') { Serial.print("Right"); motor1.run(FORWARD); motor2.run(BACKWARD); } if(command == 'S') { Serial.print("Stop"); motor1.run(RELEASE); motor2.run(RELEASE); } } }
- Сборка
- Скетч
- Видео
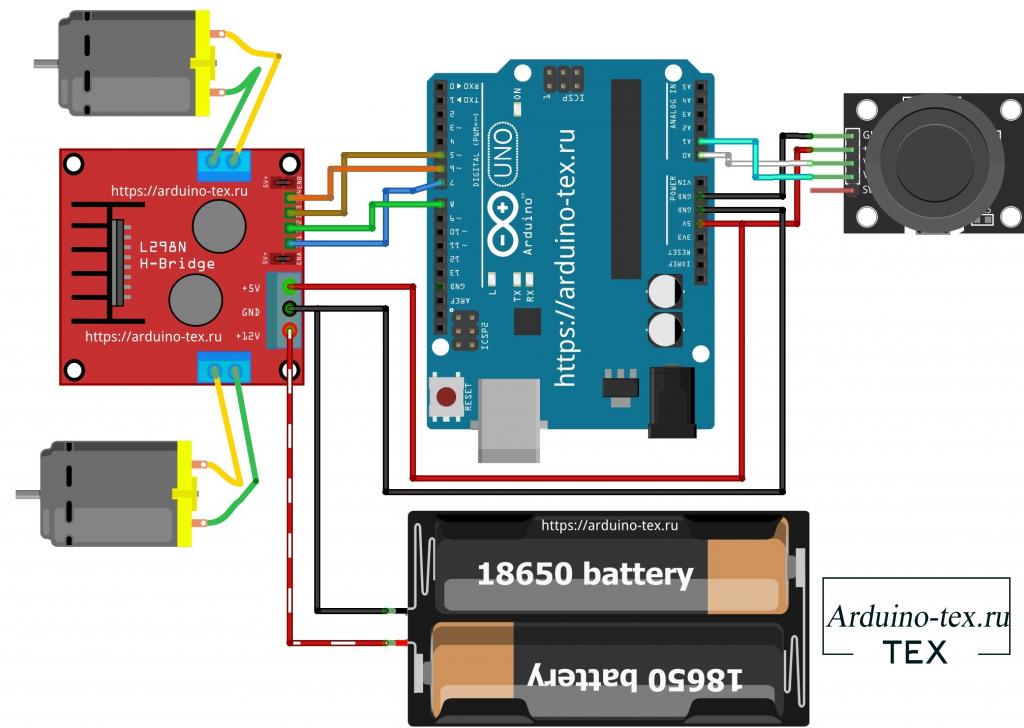
- Шаг 8. Электрические соединения
- Схема подключения
- Контролируем со смартфона радиоуправляемую машину с использованием Arduino
- Схема
- Подключение модуля Bluetooth
- Подключение моторов
- Программа для Arduino
- Шаг 7. Источник питания
- Видео:
- Машинка Arduino – как собрать и программа
Bluetooth машинка на Arduino — схема и программа для управления двумя моторами

Сегодня мы рассмотрим проект, который позволит вам создать свою собственную радиоуправляемую машинку с помощью Arduino и Bluetooth. Эта машинка будет управляться с помощью специального приложения на вашем смартфоне, что делает ее управление еще более удобным и интересным. В этой статье мы подробно расскажем о схеме подключения, программе для Arduino и о процессе сборки машинки. Также вы сможете скачать все необходимые комплектующие и скетч для Arduino.
Для управления машинкой мы используем модуль Blutooth HC-06, который подключается к Arduino через RX и TX порты. Таким образом, сигнал от смартфона поступает на Arduino, а уже ардуино подает управляющий сигнал на двигатели. Для управления движением машинки нам понадобятся 2 двигателя. В нашем случае для управления моторами мы используем простую логику: подаем сигнал на 2 из 4 выходов транзистора, чтобы контролировать вращение моторов. Для питания машинки используется батарея постоянного тока.
Крепления для электрических элементов и моторов также должны быть надежными. Мы используем крепежные болты для установки моторов и фиксации различных компонентов. В нашем видео выше вы можете увидеть все детали установки и сборки машинки. Черный провод мотора подключается к GND, а красный провод — к VCC. Для подключения питания используется батарея, которая замкнута на радиоуправляемую машинку.
Если вы хотите использовать свою собственную программу для управления машинкой, вам потребуется соответствующий скетч для Arduino. В нашем случае мы используем программу с комбинацией функций leftwheelforward для вращения левого колеса вперед и rightwheelforward для вращения правого колеса вперед. Таким образом, вы можете контролировать движение машинки с помощью своего смартфона.
Шаг 1. Комплектующие
Для создания Bluetooth машинки на Arduino нам понадобятся следующие комплектующие:
- Arduino Nano — миниатюрная плата для разработки программного обеспечения
- HC-06 модуль Bluetooth — позволяет устанавливать беспроводное соединение с мобильным устройством
- LM298N H-мост — специальная микросхема для управления двигателями
- Двигатели — используем два мотора для передвижения машины
- Крепежные элементы — необходимы для сборки шасси и крепления компонентов
- Батарея — источник питания для машинки
- Провода — для соединения всех элементов
В нашем случае, для шасси машинки можно использовать фанеру или любой другой подходящий материал.
Для управления двигателями мы будем использовать LM298N H-мост, который подключается к Arduino и позволяет контролировать направление вращения и скорость моторов.
HC-06 модуль Bluetooth подключается к Arduino и позволяет устанавливать беспроводное соединение с мобильным устройством через приложение.
Также нужно подключить два мотора к H-мосту. Для этого каждый мотор соединяется с двумя клеммами H-моста, при этом положительная и отрицательная полярность мотора соединяется с соответствующими клеммами.
На схеме подключения ниже показаны все необходимые соединения и элементы для сборки машинки:
- Arduino Nano — контроллер, который управляет всей логикой работы машины
- HC-06 модуль Bluetooth — для установки беспроводного соединения и контроля машины через приложение на мобильном устройстве
- LM298N H-мост — для контроля двигателей машины
- Двигатели — для передвижения машины в разные направления
- Батарея — для подачи постоянного питания на Arduino и двигатели машины
- Крепежные элементы — для крепления всех компонентов на шасси машины
Теперь, когда мы познакомились с комплектующими, можно переходить к сборке машинки и написанию кода для управления.
Шаг 10. Приложение для смартфона
Скачайте приложение для управления Bluetooth машинкой на ваш смартфон. Если у вас телефон на операционной системе Android, вы можете скачать приложение «Bluetooth RC Car Controller» из Google Play. Для пользователей iOS доступно приложение «Bluetooth RC Controller» в App Store.
После установки приложения, подключитесь к вашей Bluetooth машинке. Введите пароль, предварительно установленный в коде Arduino.
Приложение позволяет управлять машинкой с помощью свайпов вверх/вниз и вправо/влево по экрану смартфона. Также вы можете использовать кнопки «Вперед», «Назад», «Влево», «Вправо» в приложении, чтобы управлять моторами.
Перейдем к коду Arduino. В блоке setup() установите скорость моторов с помощью функции analogWrite(). Значение от 0 до 255.Чем больше значение, тем быстрее движется мотор. В случае нашей программы мы установим скорость 200.
Ниже приведён код, который вы можете использовать в вашей Arduino программе:
#include <AFMotor.h> AF_DCMotor motor1(1); AF_DCMotor motor2(2); void setup() { Serial.begin(9600); motor1.setSpeed(200); motor2.setSpeed(200); } void loop() { if(Serial.available() > 0) { int command = Serial.read(); if(command == 'F') { Serial.print("Forward"); motor1.run(FORWARD); motor2.run(FORWARD); } if(command == 'B') { Serial.print("Reverse"); motor1.run(BACKWARD); motor2.run(BACKWARD); } if(command == 'L') { Serial.print("Left"); motor1.run(BACKWARD); motor2.run(FORWARD); } if(command == 'R') { Serial.print("Right"); motor1.run(FORWARD); motor2.run(BACKWARD); } if(command == 'S') { Serial.print("Stop"); motor1.run(RELEASE); motor2.run(RELEASE); } } }
Сборка
Для сборки Bluetooth машинки на Arduino вам понадобятся следующие комплектующие:
- Arduino Nano
- Модуль Bluetooth HC-06
- Модуль H-моста L298N
- Двигатели моторов (2 штуки)
- Аккумулятор 9V
- Крепежные болты и гайки
- Провода для подключений
1. Установка моторов.
В схеме предусмотрена комбинация двух модулей H-моста L298N, которая позволяет контролировать двигатель в двух направлениях вращения. Пришлось установить их выше моторов с помощью гайки и болта, чтобы они не мешали вращению колес машины.
2. Подключение моторов к модулю H-моста.
На схеме указано, какие провода нужно использовать для подключения моторов. Следуйте этим указаниям и используйте крепежные болты для фиксации проводов.
3. Подключение модуля Bluetooth HC-06.
Установите модуль Bluetooth HC-06 вместе с Arduino и подключите его к нужным контактам. На схеме вы можете увидеть, какие провода нужно использовать для подключения этого модуля.
4. Подключение аккумулятора.
Подключите аккумулятор 9V к модулю H-моста и Arduino. Установите перемычки на модуле H-моста для правильного питания.
5. Установка машинки.
Соберите машинку с помощью крепежных болтов и гаек. Убедитесь, что все провода подключены правильно и замкнуты.
6. Установка приложения.
Установите приложение для управления машинкой через Bluetooth. Вы можете найти подходящее приложение в соответствующем магазине приложений для вашего устройства.
7. Тестирование.
Запустите приложение и проверьте, работает ли машинка нормально. Вы можете управлять двигателями, меняя направление вращения и скорость с помощью приложения.
Теперь ваша радиоуправляемая машинка на Arduino с Bluetooth готова к работе!
Скетч
В нашем случае скетч будет выполнять следующие функции:
- Настроить порты Arduino для подключения двигателей и модуля Bluetooth.
- Установить нужные направления вращения для приводов, чтобы машинка могла двигаться вперёд и назад.
- Определить комбинации сигналов, которые будут устанавливать разные скорости и направления движения.
- Установить соединение через Bluetooth модуль и принимать команды с помощью ленты светодиодов, которая будет держаться на машинке.
- Использовать аналогичные комбинации сигналов для управления двигателем и изменения его скорости.
- Следовать по командам с Bluetooth модуля и двигаться в нужном направлении и со скоростью.
Вся программа в скетче будет написана на языке Arduino и состоять из команд, которые устанавливают нужные значения на портах Arduino. Вы можете скачать скетч для Bluetooth машинки из видео и использовать его в своем проекте.
Пришлось немного разобраться с подключениями и использовать крепёжные болты и гайки для установки модуля Bluetooth и H-моста на базу шасси, но в целом все было нормально. Для подключений используем провода, которые есть в комплектующих. Питание машинки осуществляется от аккумулятора или батареи.
Схема подключения вполне простая. На базу шасси можно установить двигатели в нужных местах с помощью крепежных болтов и гаек. Провод от двигателя соединяем с H-мостом, а затем с Arduino. Также подключаем Bluetooth модуль к плате Arduino. Все провода можно уложить в видео таких, чтобы они не мешали движению машинки.
Теперь можно использовать скетч для управления машинкой. При помощи Bluetooth модуля выходящего сигнала подключаем его к плате Arduino, используя провода. Следуйте инструкции, которая есть в скетче, чтобы установить нужные направления и скорости движения. Кроме того, можно использовать ленту светодиодов для отображения сигналов.
Таким образом, вперёд, к созданию своей радиоуправляемой машинки на Arduino с использованием Bluetooth и электрических приводов!
Видео
В этом разделе мы рассмотрим, как контролировать два мотора направлении и скорости с помощью Bluetooth-машинки на Arduino. Для этого мы будем использовать схему и программу, которые были описаны ранее.
Для управления машинкой с помощью смартфона нам понадобится установить специальное приложение нашей Arduino. Это приложение позволит нам контролировать двигателя нашей машинки с помощью аналогичного кода, который был использован раньше.
На видео мы покажем, как все это установка работает в действии. Вы увидите, как двигатели вращаются вперед и назад, а также изменяют свою скорость. Кроме того, мы покажем, как изменить направление вращения моторов с помощью приложения.
Схема подключения модуля Bluetooth и моторов также выведена на видео. Мы использовали модуль H-моста L298 для управления двумя моторами. Все необходимые комплектующие, такие как провода, проводов подключения и крепежные элементы, тоже показаны на видео.
Для установки моторов на шасси нам потребуется фанера или другое подходящее материал. Мы используем моторы с мощностью 298, которые могут вращаться в прямом и обратном направлениях.
Код для управления машинкой можно скачать из описания к этому видео. Как вы можете видеть, код достаточно прост, а благодаря использованию Bluetooth-модуля мы можем контролировать двигатели машинки с любого смартфона.
Видео демонстрирует работу машинки, когда мы управляем ею с помощью смартфона. Мы показываем, как менять скорость вращения, направление двигателей, а также прямое и обратное движение.
Использование Bluetooth-модуля позволяет нам создать свой собственный пульт управления для машинки с помощью смартфона. Это очень удобно и позволяет нам управлять машинкой из любого места.
Надеюсь, это видео было полезным для вас и помогло вам понять, как работает Bluetooth-машинка на Arduino. Если у вас остались какие-либо вопросы, пожалуйста, задайте их в комментариях к видео, и я с удовольствием на них отвечу.
Шаг 8. Электрические соединения
Для создания электрических соединений вам потребуются следующие элементы:
- Моторы для приводов машинки (4 шт.)
- Крепежные болты и гайки для крепления моторов
- Плата Arduino
- Модельный крепеж для платы Arduino
- Батарея для питания
- Элементы питания для Arduino и моторов (3.3 В и 5 В)
- Транзисторы для управления моторами (4 шт.)
- Микросхему для установки на плату Arduino
- Модуль Bluetooth для передачи сигнала
- Резисторы и перемычки для подключения модуля Bluetooth
Начните с подключения модуля Bluetooth к плате Arduino следуя инструкциям производителя. Обратите внимание, что некоторые модули Bluetooth могут быть замкнуты, поэтому убедитесь, что вы правильно подключаете провода к модулю.
Далее, подключите моторы к плате Arduino. Каждый мотор должен быть подключен к своему транзистору для управления направлением вращения. Подключите соединения моторов к плате Arduino с помощью перемычек и проводов. Убедитесь, что все соединения надежно держатся. Если вас смущает количество проводов, не волнуйтесь — это нормально для такой модели машины.
После этого, подключите модуль Bluetooth к плате Arduino и проверьте, работает ли он, загрузив соответствующий скетч на плату. Если все работает хорошо, то ваша машинка готова к управлению с помощью Bluetooth.
Схема подключения
Для создания bluetooth машинки на Arduino, нам потребуются следующие комплектующие и элементы:
- Плата Arduino (например, Arduino Uno)
- Моторы (два шаговых мотора)
- Микросхема L298 для управления моторами
- Мосфет-транзисторы для управления шаговыми моторами
- Модуль Bluetooth HC-06
- Аккумулятор постоянного питания
- Шасси для машинки
- Элементы крепления (болты, гайки, перемычки и другие крепёжные детали)
- Фанера или другие материалы для создания корпуса машинки
Схема подключения выглядит следующим образом:
- Подключите моторы к микросхеме L298:
- Подключите микросхему L298 к Arduino:
- Подключите модуль Bluetooth HC-06:
- Подключите провода от модуля HC-06 к пинам TX и RX на плате Arduino.
- Подключите провода VCC и GND модуля HC-06 к пинам 5V и GND соответственно на плате Arduino.
- Подключите аккумулятор постоянного питания к плате Arduino:
- Подключите провода от аккумулятора к пинам Vin(+) и GND(-) на плате Arduino.
После подключения всех компонентов, можем приступить к программированию Arduino с помощью скетча:
В программе Arduino необходимо использовать следующий код:
#include <AFMotor.h>
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
void setup()
{
Serial.begin(9600); // инициализация связи по скорости 9600
}
void loop()
{
if (Serial.available() > 0) // проверка наличия данных в буфере
{
int data = Serial.read(); // считывание данных из буфера
switch(data)
{
case 'F': // движение вперед
motor1.run(FORWARD);
motor2.run(FORWARD);
break;
case 'B': // движение назад
motor1.run(BACKWARD);
motor2.run(BACKWARD);
break;
case 'L': // поворот влево
motor1.run(BACKWARD);
motor2.run(FORWARD);
break;
case 'R': // поворот вправо
motor1.run(FORWARD);
motor2.run(BACKWARD);
break;
case 'S': // остановка
motor1.run(RELEASE);
motor2.run(RELEASE);
break;
}
}
}
Теперь, когда у нас есть собственная bluetooth машинка, мы можем скачать приложение на наш телефон или планшет, которым будем управлять машинкой. В приложении нужно использовать компоненты управления (например, кнопки или стрелки), которые будут взаимодействовать с модулем Bluetooth HC-06 и отправлять управляющие команды (например, «F» — вперед, «B» — назад, «L» — влево, «R» — вправо, «S» — стоп).
В этом видео вы можете увидеть пример работы радиоуправляемой машинки с использованием Bluetooth:
Теперь ваша машинка готова к поездке! Просто запустите скетч на Arduino и используйте приложение для управления машинкой с помощью Bluetooth.
Контролируем со смартфона радиоуправляемую машину с использованием Arduino
Если вас меня интересует радиоуправляемая машинка, то с использованием Arduino и Bluetooth модуля вы можете создать свою собственную машинку, которой можно управлять со смартфона. В этом разделе мы расскажем о схеме и программе для управления двумя моторами с использованием Arduino.
Схема
Для создания радиоуправляемой машинки с использованием Arduino вам понадобятся следующие элементы:
- Arduino Uno или аналогичная плата
- Bluetooth модуль HC-05
- Моторный щит (H-мост) на базе микросхемы L298
- Два мотора
- Источник питания (например, батарея)
- Крепления и провода
Схема подключения элементов выглядит следующим образом:
Подключение модуля Bluetooth
Подключите модуль Bluetooth HC-05 к Arduino следующим образом:
- Подключите модуль HC-05 к портам 2 и 4 на Arduino с помощью проводов
Подключение моторов

Подключите два мотора к моторному щиту (H-мост) на базе микросхемы L298 следующим образом:
- Подключите провода от моторов к выходам моторного щита
- Подключите питание моторного щита от источника постоянного тока
Программа для Arduino
Для управления моторами с использованием Arduino и Bluetooth модуля HC-05 вам понадобится следующий код:
Скачать код: ссылка на код
Код включает в себя функции для установки скорости и направления вращения моторов. Вы можете использовать комбинации кнопок на смартфоне для управления движением машинки.
Используя Arduino и Bluetooth модуль, вы можете создать управляемую со смартфона радиоуправляемую машину. В этой статье мы рассмотрели схему подключения и программу для управления двумя моторами с использованием Arduino. Теперь у вас есть все необходимые знания, чтобы собрать и запрограммировать собственную Bluetooth машинку.
Шаг 7. Источник питания
Для работы Bluetooth машинки необходимо обеспечить источник питания как для логики, так и для двигателей. В данной схеме мы будем использовать электрические батареи для обоих целей.
Для питания логики, используем батарею 9V. Она будет установлена по схеме: красный провод «+», черный «-«.
Для питания двигателей используем батарею 4.5V. Для этого пришлось установить две батареи AA (6V) таким образом, чтобы держались с помощью проводов и крепёжных гаек на шасси. В этом случае питание для Arduino и Bluetooth модуля будет поставляться через транзистор, а для двигателей — напрямую.
В коде, используем комбинации портов для управления скоростью, направлением и остановкой двигателей. Красный провод leftwheelforward и rightwheelforward соединяем с портами управления двигателями, а черный провод соединяем с GND на Arduino.
Скачать код можно по ссылке тут.
Также важно учесть, что установка Bluetooth модуля HC-06 и его крепления на шасси машинки могут варьироваться в зависимости от используемых моделей. Необходимо обратить внимание на инструкции производителя и приложенные к модулю документацию для правильной установки и подключения.
После завершения сборки и установки всех компонентов, ваша радиоуправляемая машинка будет готова к работе. Для управления используйте приложение, которое вы загрузили на свое устройство. Обычно оно работает с помощью комбинаций стрелок или кнопок «play». При правильном подключении и настройке, ваша машинка будет готова поехать в любом направлении и на любой скорости!
Видео:
Машинка Arduino – как собрать и программа
Машинка Arduino – как собрать и программа by Програмысли 20,779 views 4 years ago 25 minutes