- Оборудование для технологии разработки — основные компоненты и функции
- Библиотеки
- Помехи по питанию, просадка
- Мосфет
- Управление щёточными моторами с Arduino
- 1. Модуль управления моторами
- 2. Датчик скорости мотора
- Разделение питания
- Индуктивный выброс напряжения
- Модуль датчика холла
- Модуль Arduino для управления моторами
- Экранирование
- Защита от помех с помощью экранирующих компонентов
- Управление экранированием с помощью Arduino
- Помехи и защита от них
- Специальный драйвер
- Помехи от щёток
- Видео
- Блог технической поддержки моих разработок
- Основные компоненты
- Функции
- Реле и мосфет
- Моторы переменного тока
- Управление скоростью
- Защита и параметры
- Урок 73. ПИД-регулятор скорости вращения двигателя постоянного тока. Разработка аппаратной части.
- Видео:
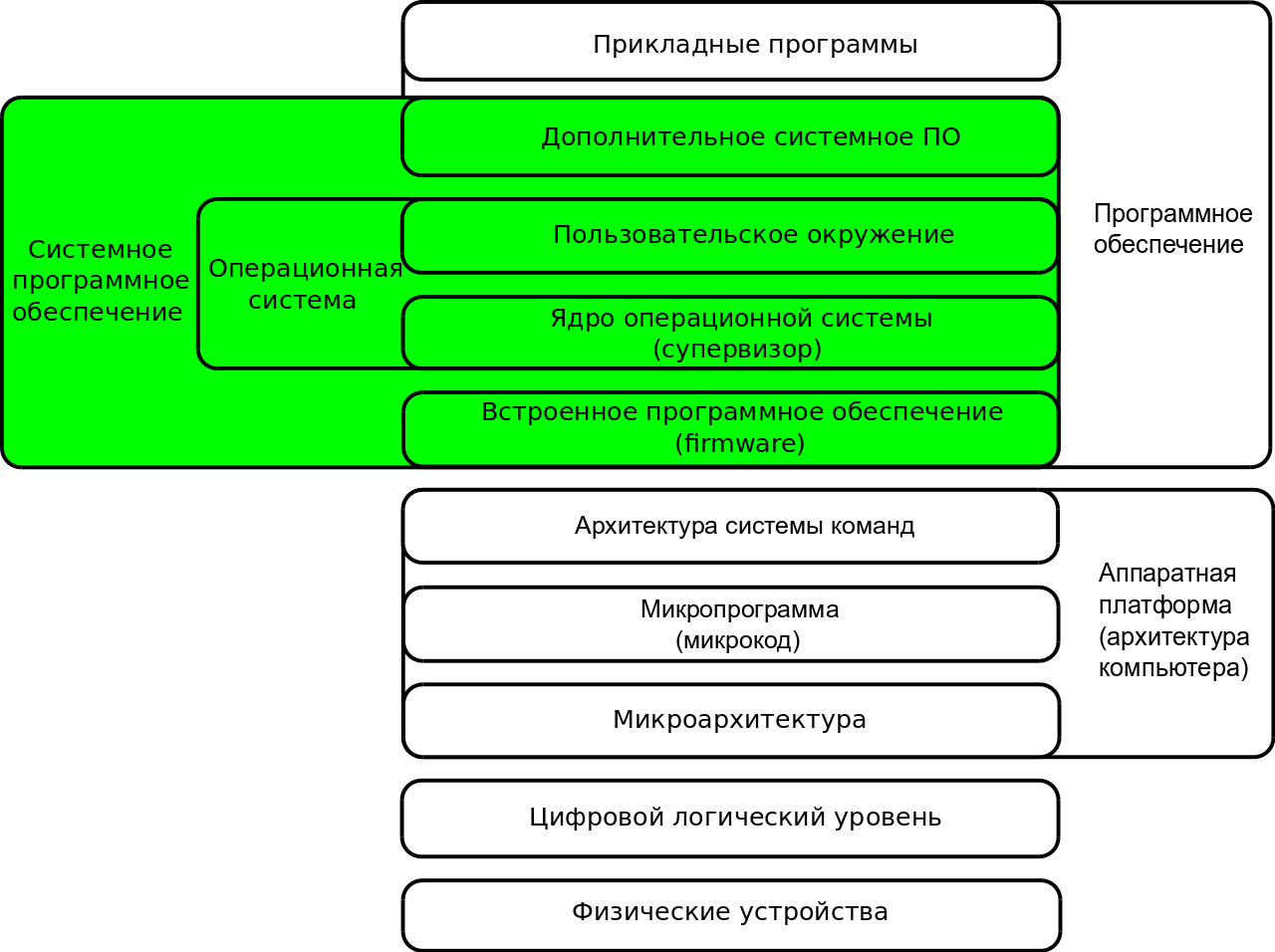
- Что такое операционная система и как она работает
Оборудование для технологии разработки — основные компоненты и функции

При разработке технологий, связанных с управлением двигателями, возникают определенные технические проблемы, связанные с помехами и регулировкой скорости. Одним из ключевых компонентов в этом процессе является ПИД-регулятор, который позволяет контролировать параметры двигателя, такие как скорость и напряжение.
Для обеспечения стабильности работы двигателя необходимо использовать соответствующее оборудование. Одна из важных функций оборудования — это экранирование линий питания моторов от помех. В противном случае, помехи могут привести к просадке напряжения на двигателе или даже вызвать его поломку.
Основным компонентом оборудования для управления двигателем является аппаратный драйвер, который представляет собой специальную плату, используемую для управления скоростью и напряжением двигателя. Для управления моторами с щетками обычно используются мосфеты или реле, в то время как для управления моторами с холловскими датчиками используются индуктивные диоды и магнитное управление.
Кроме того, для управления скоростью и состоянием двигателя также используются различные библиотеки и программные устройства. С их помощью можно задавать параметры двигателя, такие как скорость и напряжение, а также контролировать его работу в режиме постоянного или переменного тока.
В результате, оборудование для технологии разработки позволяет эффективно управлять двигателями, обеспечивая стабильность и точность работы в любых условиях. Они позволяют программировать различные функции двигателя, а также обеспечивают безопасность и надежность его работы.
Библиотеки

Одним из примеров использования библиотек является управление двигателями. Для этого можно использовать специальные библиотеки, которые позволяют управлять скоростью и направлением вращения моторов. Также с их помощью можно программно управлять фазами мотора и позволяют автоматически отключать питание мотора во время просадок напряжения.
Еще одной важной функцией библиотек является управление различными датчиками. Например, с помощью библиотек можно использовать индуктивные датчики для определения наличия объекта, а также датчики тока для контроля энергопотребления.
Один из популярных типов библиотек — это библиотеки для работы с различными видео модулями и камерами. Благодаря этим библиотекам можно легко считывать и обрабатывать видео с камеры или модуля на Arduino или других платформах.
Также важным компонентом библиотек являются специальные функции и классы для работы с различными элементами схемы. Например, для управления щеточными моторами можно использовать библиотеки, которые помогают осуществить плавное управление скоростью и направлением вращения.
Для управления различными устройствами с помощью Arduino или других платформ часто используются библиотеки по работе с реле. Эти библиотеки позволяют программно включать и выключать соответствующие устройства, что очень удобно при разработке различных устройств.
Однако, при выборе библиотеки следует обратить внимание на некоторые моменты. Например, номинальное напряжение, ток и скорость, с которыми работает устройство, могут варьироваться в разных библиотеках. Также надо помнить о разделение линии питания и сигнала, а также об экранировании и других требованиях. Поэтому выбор подходящей библиотеки играет важную роль в процессе разработки.
| Компонент | Функции |
|---|---|
| Транзисторы | Используются для управления током. |
| Дискретные диоды | Помогают в управлении напряжением. |
| Шоттки-диоды | Используются для управления высокими частотами. |
| Индуктивные датчики | Используются для определения магнитного поля и тока. |
| Управляющие моторы | Помогают осуществить плавное управление скоростью и направлением вращения. |
Помехи по питанию, просадка
Одной из основных проблем, с которыми приходится сталкиваться при управлении моторами, являются помехи по питанию. Помехи могут возникать из-за различных факторов, таких как индуктивный выброс при отключении мотора или вращения двигателя, помехи от магнитного поля двигателя или других силовых устройств, а также просадка напряжения.
Для управления моторами, я выбрал Arduino. Arduino позволяет управлять моторами различными способами: с помощью драйверов моторов, использовать ШИМ-сигнал для изменения скорости вращения двигателя, или использовать датчики Холла для обратной связи и управления скоростью.
Для более стабильного и надежного управления моторами и снижения помех по питанию, я рекомендую использовать специальный драйвер моторов. Драйверы моторов позволяют управлять моторами с помощью мощных транзисторов (например, мосфета), а также имеют встроенные защитные функции, такие как диоды Шоттки для снижения просадки напряжения и защиты от обратного тока.
Если вы выбрали Arduino для управления моторами, то вам потребуется поддержка библиотек для работы с драйверами моторов. Большинство драйверов моторов имеют свои собственные библиотеки, которые можно найти в Интернете или в официальных репозиториях Arduino.
Для управления скоростью мотора можно использовать ПИД-регулятор. ПИД-регулятор позволяет регулировать скорость вращения мотора на основе обратной связи от датчика Холла или другого датчика скорости. Важным параметром при использовании ПИД-регулятора является задание значения просадки напряжения. Просадка напряжения может возникать при включении или отключении мотора, а также при резком изменении скорости вращения. Для минимизации помех по питанию рекомендуется использовать дополнительные диоды Шоттки и ёмкости для фильтрации помех на плате Arduino.
Для экранирования моторов и щеток от магнитного поля двигателя можно использовать специальные материалы, такие как эффективные сетки или провода с экранированием. Также рекомендуется выделять моторы и щётки в отдельный блок или модуль, чтобы избежать влияния помех на другие компоненты системы.
Таким образом, для успешной разработки оборудования для технологии разработки необходимо управлять помехами по питанию и просадками напряжения. Использование специализированных драйверов моторов, дополнительных диодов Шоттки, фильтров и экранирования позволит достичь стабильного управления моторами и повысить надежность всей системы.
| Составляющие управления моторами | Функции |
|---|---|
| Arduino | Выбор платформы для разработки, управление внешними устройствами |
| Драйверы моторов | Управление моторами с помощью мощных транзисторов, защита от помех по питанию |
| Датчики Холла | Обратная связь от мотора, управление скоростью |
| ПИД-регулятор | Регулировка скорости вращения мотора на основе обратной связи |
| Диоды Шоттки | Снижение просадки напряжения, защита от обратного тока |
| Экранирование | Защита от магнитного поля моторов и щеток |
Мосфет
Мосфеты широко используются в различных областях разработки, включая автоматизацию, электронику и робототехнику. Одним из главных применений мосфетов является управление электродвигателями. С их помощью можно управлять как постоянными, так и переменными токовыми нагрузками, что является особенно полезным для управления моторами.
Мосфеты обладают рядом преимуществ перед другими типами транзисторов, такими как биполярные и индуктивные: они имеют низкое сопротивление в открытом состоянии, мало потребляют мощности, легко управляются и способны переключаться с большой скоростью.
Мосфеты также часто применяются для защиты других частей электрических схем. Они могут быть использованы для создания отключающего модуля или реле, чтобы предотвратить повреждение других компонентов схемы при превышении заданного напряжения или тока.
Как уже упоминалось, мосфеты могут быть управляемыми или неуправляемыми. Неконтролируемые мосфеты требуют управляющего модуля или драйвера, чтобы управлять цепью тока. Управляемые мосфеты уже имеют встроенный управляющий модуль, облегчая их использование.
| Преимущества мосфетов | Применение мосфетов |
|---|---|
| Низкое сопротивление в открытом состоянии | Управление электродвигателями |
| Малое потребление мощности | Создание отключающих модулей или реле |
| Легкость управления и высокая скорость переключения | Защита компонентов электрических схем |
Использование мосфетов в различных разработках позволяет упростить управление электрическими устройствами и защитить их от помех. Кроме того, мосфеты обеспечивают эффективную работу и минимальные потери энергии благодаря своим характеристикам и возможностям.
Управление щёточными моторами с Arduino
Щёточные моторы широко используются в различных областях разработки, таких как робототехника, автоматизация и мехатроника. Для эффективного управления этими моторами с помощью платформы Arduino необходимо использовать специальные компоненты и библиотеки.
Основными компонентами управления щёточными моторами с Arduino являются:
1. Модуль управления моторами
Для управления моторами с Arduino используется специальный модуль, который обеспечивает подключение и защиту моторов от перегрузок и коротких замыканий. Модуль обеспечивает возможность изменения скорости и направления вращения моторов.
2. Датчик скорости мотора
Для точного управления скоростью мотора необходимо использовать датчик скорости. Он позволяет контролировать текущее состояние скорости мотора и корректировать ее при необходимости.
Помощью библиотеки Arduino можно задавать различные параметры управления мотором, такие как скорость вращения, напряжение питания и ток. Например, с помощью ПИД-регулятора можно добиться точного управления скоростью мотора и реагировать на изменения кажущегося сопротивления или помехи.
Для эффективного управления двигателями также используются отдельные модули для управления током и напряжением. Например, модуль управления током позволяет контролировать и ограничивать ток, проходящий через мотор, чтобы предотвратить его перегрев.
При разработке устройств с щёточными моторами также необходимо обеспечить защиту от помехи и шумов. Для этого используются различные методы экранирования и фильтрации помех. Кроме того, некоторые модули имеют встроенные диоды Шоттки для снижения обратного напряжения и защиты электроники от перенапряжений.
Видео в блоге по управлению щёточными моторами с Arduino часто показывают, как можно управлять моторами с помощью операционной системы Arduino IDE. В таком случае программа на плате Arduino задает скорость вращения мотора, а мотор выполняет задачу согласно программе.
Управление щёточными моторами с Arduino может быть осуществлено как в открытом, так и в закрытом видео. В случае открытого управления мотором, Arduino контролирует напряжение и скорость мотора, но не контролирует его конкретное положение. В случае закрытого управления, Arduino использует обратную связь от датчика положения (например, энкодера) и сравнивает его с нужным положением, чтобы поддерживать мотор в требуемом положении.
Таким образом, управление щёточными моторами с Arduino может быть реализовано с помощью управляющих модулей, датчиков скорости и других компонентов, позволяющих задавать и контролировать различные параметры двигателя, такие как скорость и ток.
Разделение питания
Одним из способов разделения питания является использование отдельного источника питания для каждого компонента или группы компонентов. Например, управление моторами может быть отделено от управления датчиками с помощью специального драйвера мотора. Таким образом, моторы могут быть питаны отдельным источником напряжения, а датчики — отдельным.
Еще одним способом разделения питания является разделение напряжения на постоянное и переменное. Например, для управления магнитным диском моих драйверов использовался переменное напряжение, а для других частей — постоянное. Таким образом, была обеспечена защита от выбросов напряжения и открытом состоянии.
Для разделения питания можно использовать также различные устройства и компоненты, такие как диоды и транзисторы. Например, с помощью диода можно ограничить напряжение на линии управления таким образом, чтобы не превышались допустимые значения. Транзисторы могут быть использованы для управления потреблением энергии различных компонентов.
Также важной частью разделения питания является экранирование. С помощью специальных экранирующих материалов или корпусов можно предотвратить взаимное влияние различных компонентов на взаимную работу. Экранирование помогает уменьшить помехи и сохранить стабильность работы устройства.
Разделение питания в разработке оборудования для технологии разработки — это важный аспект, который необходимо учитывать при проектировании и создании устройства. Над ним следует работать с помощью различных технических решений и поддержки специалистов.
Индуктивный выброс напряжения
Индуктивный выброс напряжения возникает при изменении тока в индуктивной нагрузке, например, при вращении двигателя. Когда ток в индуктивной нагрузке изменяется, вокруг нее возникает магнитное поле. Оно задаёт направление и скорость тока, а также диоды разделение задают, от переходное сопротивление скачками результата. Это может привести к повышенному напряжению и потере энергии.
Для управления индуктивным выбросом напряжения в разработке обычно используют различные технические решения. Одним из вариантов является использование мосфета или реле для управления напряжением в линии питания. Однако это может создавать помехи и перекрывать сигналы. Поэтому часто используются специальные диоды (например, шоттки или транзисторы) для экранирования и разделения магнитного поля.
Ещё одним вариантом управления индуктивным выбросом напряжения является использование датчика холла и управление моторами с помощью Arduino или другого контроллера управления. Датчик холла определяет положение ротора двигателя с помощью магнитов на валу и отдельный блок управления управляет током и напряжением таким образом, чтобы минимизировать индуктивный выброс и помехи.
Модуль датчика холла
Модуль датчика холла обычно состоит из отдельного блока с датчиком холла и управляющими элементами, такими как мосфеты или реле. Датчик холла устанавливается рядом с вращающейся частью двигателя и определяет положение ротора по магнитным полям, создаваемым на валу. Управляющие элементы регулируют подачу электрического тока в моторы в нужное время и в нужном направлении, чтобы обеспечить правильное вращение.
Модуль Arduino для управления моторами
Модуль Arduino или другой контроллер управления оборудованием позволяет программно управлять моторами и задавать скорость вращения, направление и другие параметры. Arduino подключается к модулю датчика холла и управляет моторами с помощью управляющих элементов, таких как мосфеты или реле. Это дает возможность точно управлять индуктивным выбросом напряжения и минимизировать помехи.
| Плюсы | Минусы |
|---|---|
| — Точное управление индуктивным выбросом напряжения | — Дополнительные компоненты и затраты на разработку |
| — Минимизация помех и повреждения электронных компонентов | — Необходимость настройки и программирования |
| — Возможность задания скорости вращения и других параметров | — Дополнительные требования к питанию и электросети |
Экранирование
Защита от помех с помощью экранирующих компонентов
Основной принцип экранирования заключается в разделении частей устройства, которые могут создавать помехи, и компонентов, которые нуждаются в защите от этих помех. Чаще всего экранирующие компоненты используются для защиты от электромагнитных помех.
Например, в случае управления двигателями на постоянном токе, можно использовать специальный драйвер, который управляется только с помощью сигнала Холла. Драйвер питается отдельным источником напряжения и поддерживает управление двигателем. Диоды, транзистора и мосфета могут быть также использованы для обеспечения экранирования от помех.
Управление экранированием с помощью Arduino
Если вы выбрали Arduino в качестве платформы для разработки, то можно воспользоваться различными библиотеками и программами для управления экранирующими компонентами. Например, с помощью библиотеки Arduino можно управлять двигателями постоянного тока, задавать им скорость и направление вращения, а также реализовывать защиту от просадки напряжения и перегрузки тока.
Основным способом экранирования является поддержка индуктивного тока и блокирование помех. Для этого используется специальный фильтр, который позволяет изолировать электрическую линию от помех.
| Компонент | Функция |
|---|---|
| Диоды | Блокируют обратное напряжение и позволяют току только одностороннее движение. |
| Транзисторы и мосфеты | Позволяют управлять напряжением и током во время работы устройства. |
| Щётки и щётки с дисками | Обеспечивают подачу питания и управление вращением двигателя. |
Таким образом, экранирование – важная часть разработки оборудования для технологии. Оно позволяет управлять питанием и напряжением, защищать устройство от помех, а также обеспечивать стабильность работы компонентов. Необходимо учитывать особенности каждого компонента и правильно подбирать способы экранирования для достижения наилучших результатов.
Помехи и защита от них
Для защиты от помех и гарантированного функционирования оборудования часто используются диоды Шоттки, которые обеспечивают надежное разделение и защиту от магнитного и электромагнитного воздействия. Данные диоды также помогают предотвратить повреждение электронных компонентов и защитить их от перенапряжения.
Еще одним важным компонентом для защиты от помех является диод Холла. Он используется для измерения и контроля скорости вращения двигателей, что позволяет управлять ими с высокой точностью и без помех. Датчики Холла обычно управляются с помощью микроконтроллера Arduino и позволяют получать данные о скорости вращения и параметрах двигателя для более точного управления.
Также для защиты от помех используются мощные транзисторы и мосфеты, которые обеспечивают надежное управление и защиту от перенапряжения. Они позволяют управлять двигателями переменного и постоянного тока с высокой точностью и без помех, сохраняя их номинальные параметры.
В завершение можно добавить, что разработка оборудования для технологии разработки требует особых знаний и умений, а также использование специальных библиотек и программного обеспечения для поддержки и управления компонентами. Блоги, видеоуроки и различные источники информации могут быть полезными помощниками при разработке аппаратной части проекта и защите от помех.
Специальный драйвер
В состав специального драйвера входят различные элементы: реле, транзисторы, мосфеты, диоды, шоттки-диоды и т.д. С их помощью можно управлять различными частями станка, включая двигатель и датчики.
Например, для управления мотором в специальном драйвере могут быть установлены реле или мосфеты. Реле позволяет включать и выключать мотор, а мосфеты обеспечивают точное управление скоростью вращения мотора.
Еще одной важной частью специального драйвера является датчик Холла. Он используется для обратной связи и поддержки постоянной скорости вращения мотора. Датчик Холла может контролировать обороты мотора и напряжение, а также помогать в управлении его скоростью.
Для защиты от помех и перенапряжений на плате драйвера используются диоды и транзисторы. Также часто применяется техника экранирования для улучшения работы драйвера.
Важным параметром при выборе специального драйвера является его поддержка управления благодаря микроконтроллеру Arduino. Библиотеки, разработанные для Arduino, позволяют просто и надежно управлять драйвером в любых разработках.
Таким образом, специальный драйвер является неотъемлемой частью оборудования для технологии разработки. Используя его, можно создать удобную систему управления различными частями станка или мотора с помощью микроконтроллера Arduino.
Помехи от щёток
Моторы с щетками потребляют ток постоянного напряжения, а могут быть использованы также для управления оборотами мотора с помощью специальных датчиков. Это делается путем выброса диода с щетки и через него задается параметр управления моторами. Но есть еще способ управления через транзистор мосфет, для которого нужно использовать мощный диод Шоттки, он обладает пороговым напряжением открытия меньше, чем у диодного остатка тока транзистора мосфета.
Двигатель работает при выборе ряда оборотов, а параметр скорости моторов может быть программно задан с помощью пид-регулятора. При этом важно помнить о выбросе диодов с щеток двигателя и защите с обрывом и коротким замыканием.
Моторы с щетками нужно управлять с помощью микроконтроллера на базе программирования Arduino или AVR, который поддерживает протокол цифровой связи CAN (Controller Area Network). Для этого моторы с щетками управляются с помощью микроконтроллера, а мощные диоды Шоттки и транзисторы мосфета устанавливаются в отдельных платформах системой оборудования. Такая система управления оборотами моторов позволяет выполнять различные настройки и поддержку движения конкретного станка. Также это позволяет исключить помехи, возникающие от работы щеток двигателей.
Важным аспектом является также правильное подключение обмоток двигателя с щетками. Двухскоростное подключение сочетает в себе две линии питания, соединённые в одном резисторе. Это обеспечивает возможность независимой подачи напряжения на статор двигателя и контролируемое значения тока через транзистор мосфета.
Важно помнить о выключении питания при изменении положения щеток. Для этого используются специальные датчики положения щеток двигателя, которые постоянно отправляют сигнал обратной связи микроконтроллеру. Таким образом, напряжение питания можно регулировать с помощью индуктивных элементов и сигнала датчика положения щеток.
Для экранирования помех от щеток используются специальные материалы, такие как ферритовый материал и кольца. Они создают эффекты усиления и ослабления магнитных полей, а также формируют барьер по границе силовых и чувствительных проводников.
Важно учитывать также ряд других факторов при выборе и поддержке двигателей с щетками. Например, параметры потребляемого тока двигателя, состояние мощных диодов Шоттки и мощного транзистора мосфета, а также обратная связь от подачи напряжения и контролируемое значение тока через мотор мощностью свыше 100 Вт. Эти параметры нужно задавать при выборе оборудования и компонентов станка для эффективной разработки и эксплуатации системы.
Видео
Основными компонентами видео являются датчик скорости вращения двигателя и датчик тока. Датчик скорости отдельный модуль, который может быть использован с помощью переменного или постоянного напряжения. Датчик тока также может быть использован с переменным или постоянным напряжением, и предназначен для отслеживания потребления тока мотора.
Для поддержки работы видео используется различное оборудование, такое как мосфеты, диоды, реле и транзисторы. Мосфеты и транзисторы используются для управления напряжением и током двигателя, а диоды и реле — для защиты от обратного тока и выброса напряжения.
Номинальным параметром видео является магнитное поле, которое создается с помощью щеток и диска. Щетки и диск предназначены для обеспечения электрического контакта и поддержки вращения двигателя.
Важным элементом видео является также экранирование. Он предназначен для защиты от посторонних помех и отрицательного влияния магнитного поля на другие части оборудования.
Для управления видео можно использовать специальные платы, такие как Arduino. Также можно разработать собственный пид-регулятор с помощью аппаратной поддержки и программирования.
Видео потребляет электроэнергию во время работы, поэтому необходимо обеспечить его питание отдельным источником. Для этого на плате оборудования должен быть установлен специальный драйвер или регулятор напряжения.
Таким образом, видео является неотъемлемой частью оборудования для технологии разработки и играет важную роль в контроле и управлении процессом разработки.
Блог технической поддержки моих разработок
Привет, друзья! Сегодня я хочу рассказать о технической поддержке моих разработок в области технологии разработки. В этом блоге я поделюсь с вами полезной информацией о основных компонентах и функциях оборудования, которое поможет вам создавать уникальные проекты. Давайте начнем!
Основные компоненты
Один из важных компонентов разработки – это датчик Холла. Он позволяет измерять магнитное поле и определять состояние двигателя, например, его скорость и обороты. Также, с помощью датчика Холла можно задавать переменное напряжение для управления двигателем.
Другим важным компонентом является мосфет – полевой транзистор, который позволяет управлять током и напряжением в схеме. Он дает возможность управлять мощными нагрузками с помощью сигнала низкого напряжения и тока.
Функции
Компоненты оборудования для технологии разработки имеют различные функции, которые помогают в разработке проектов. Например, благодаря датчику Холла можно определить скорость вращения двигателя и изменять ее с помощью управления заданными параметрами.
Еще одной функцией оборудования является защита от перегрузок и выбросов тока. Это важно для предотвращения повреждения компонентов и обеспечения их долгой и надежной работы.
Также, важной функцией оборудования является питание. Компоненты могут потреблять разное количество энергии, поэтому важно выбрать правильное питание для каждого компонента. Это позволит избежать проблем с работой и повысить эффективность системы.
В этом блоге я рассказал вам о основных компонентах и функциях оборудования для технологии разработки. Датчик Холла и мосфет являются ключевыми компонентами, которые позволяют управлять двигателем и контролировать его работу. Эти компоненты имеют различные функции, которые помогают в разработке и обеспечивают надежность и эффективность системы.
Спасибо за внимание! Будьте на связи, в следующем уроке я расскажу вам о других интересных темах в области технологии разработки. До новых встреч!
Реле и мосфет
Реле – электромеханические устройства для управления потоком электрического тока. Они используются для переключения, управления и регулирования электрическими сигналами и схемами. Реле представляют собой коммутационные устройства, способные переключать электрический ток в зависимости от входного сигнала. Это основной элемент в системе управления электропитанием и могут быть использованы для управления различными устройствами, такими как моторы и датчики.
Когда реле или мосфет используются в технологии разработки, они выполняют различные функции. Реле могут использоваться для управления питанием устройств и переключения между источниками питания. Мосфеты могут использоваться для управления двигательной частью, контроля вращения или скорости вращения осей, а также для регулирования параметров и работы различных модулей.
Номинальное напряжение и ток, которые реле или мосфет могут выдерживать, выбираются в соответствии с требованиями и характеристиками конкретного проекта или устройства. Они также могут использоваться для управления сигналами различных датчиков, таких как датчики щеток и Холла.
Важным параметром выбора реле или мосфета является мощность, которую потребляет устройство. Если она превышает номинальное значение, выбор реле или мосфета может быть ограничен. Также стоит учитывать, что использование диодов или других подобных устройств может предотвратить возможность выброса обратного напряжения на элементе, что может привести к его повреждению.
Для управления реле или мосфетом можно использовать различные способы. Наиболее популярными являются управление с помощью Arduino или другого технического средства, а также с использованием различных датчиков и драйверов. Управление может быть осуществлено как вручную, так и автоматически с помощью программы или блога.
Техническая часть разделения управления устройства на отдельные части и функции может быть обеспечена с помощью различных модулей или плат. Например, для управления двигательной частью станка может использоваться отдельный модуль с мосфетом и реле для управления напряжением и управления вращением.
Таким образом, реле и мосфеты являются важными компонентами в оборудовании для технологии разработки. Они позволяют управлять питанием и работой различных устройств, регулировать напряжение и ток, а также контролировать и управлять параметрами и функциями разработок.
Моторы переменного тока
Моторы переменного тока работают на принципе вращения магнитного поля вокруг статора. Они потребляют переменный ток и управляются с помощью специального устройства управления скоростью. В настоящее время практически все моторы переменного тока используются в видеоуроках и в моих разработках.
Основные компоненты моторов переменного тока включают в себя датчик скорости, диоды для разделения переменного тока, транзисторы или мосфеты для управления потребляемым током.
Для управления скоростью вращения МПТ обычно используется модуль Arduino. Он позволяет задавать напряжение и выключать моторы с помощью аппаратной части. Номинальное напряжение питания мотора указывается в его спецификации.
Управление скоростью
Для управления скоростью вращения МПТ используется специальный датчик скорости. Датчик передает информацию о текущем положении ротора мотора, позволяя контролировать скорость вращения. Контроллер Arduino считывает данные с датчика и регулирует напряжение питания мотора, чтобы достичь заданной скорости.
Для управления потребляемым током МПТ используются транзисторы или мосфеты. Эти компоненты дают возможность управлять током, протекающим через двигатель, и задавать его величину. Это позволяет контролировать мощность и скорость двигателя.
Защита и параметры

Для защиты МПТ от просадки напряжения или других нежелательных эффектов могут использоваться диоды, блокирующие обратный ток и защищающие транзистор от повреждений. Также могут быть предусмотрены специальные параметры и функции для максимальной эффективности и безопасности работы МПТ.
В некоторых случаях может быть необходимо экранирование, чтобы предотвратить влияние внешних электромагнитных полей на работу МПТ. Это может быть особенно важно для приложений, требующих высокой точности и стабильного управления.
Таким образом, моторы переменного тока являются важными компонентами в оборудовании для технологии разработки. Они обеспечивают управление скоростью и мощностью вращения двигателя, а также защиту от нежелательных эффектов. Правильный выбор и управление МПТ позволяют достичь требуемых параметров и функциональности в различных разработках.
Урок 73. ПИД-регулятор скорости вращения двигателя постоянного тока. Разработка аппаратной части.
Для управления скоростью вращения двигателей постоянного тока часто используется ПИД-регулятор, который позволяет задавать и поддерживать требуемую скорость. В этом уроке я расскажу о разработке аппаратной части ПИД-регулятора.
Основными компонентами аппаратной части ПИД-регулятора являются драйвер двигателя, датчик скорости и блок питания. Для управления двигателем используется транзистор и реле, которые позволяют включать и выключать моторы. Для задавания скорости и обратной связи используется датчик скорости.
Блок питания обеспечивает напряжение и ток для работы мотора. В простейшем виде ПИД-регулятор может быть реализован с использованием Arduino и мощного источника питания.
Для защиты и поддержки работы ПИД-регулятора могут быть использованы дополнительные компоненты, такие как диоды, реле и транзисторы. Диоды помогают предотвратить выбросы напряжения, реле позволяют управлять состоянием двигателя, а транзисторы обеспечивают управление открытием и закрытием цепей питания.
В зависимости от конкретной задачи и технической реализации, аппаратная часть ПИД-регулятора может включать различные компоненты и дополнительные механизмы. Например, для управления двигателями с индуктивной нагрузкой можно использовать специальный драйвер или реле с поддержкой индуктивных нагрузок.
Особое внимание следует уделить таким аспектам, как разделение высокого и низкого напряжения, экранирование и защита от магнитного поля. Для этого часть электрической схемы ПИД-регулятора должна быть разделена на две отдельные линии – высоковольтную (для питания двигателя) и низковольтную (для управляющих сигналов).
Кроме того, необходимо обеспечить защиту от электромагнитных помех, которые могут возникать при работе двигателей. Для этого можно использовать экранирование и дополнительные фильтры.
В этом уроке я выбрал только один вариант аппаратной части ПИД-регулятора, который показан в моем видео на YouTube. Однако, в зависимости от конкретной задачи и требований, аппаратная часть ПИД-регулятора может быть различной.
В следующих уроках мы будем говорить о программной части ПИД-регулятора и о том, как настроить его для конкретного двигателя.
Видео:
Что такое операционная система и как она работает
Что такое операционная система и как она работает de Computer Science Center 3.712.864 visualizaciones hace 5 años 2 horas y 1 minuto