- Подключение драйвера двигателей L293D к Arduino — пошаговая инструкция с подробными схемами и кодом
- Методы подключения драйвера L293D к Arduino
- Сравнение модулей для управления двигателями
- Модуль L293D
- Модуль HG7881
- Общие характеристики модулей
- Подключение L298N к Arduino
- Описание драйвера L298N
- Подключение драйвера L298N к Arduino
- Управление двигателями с помощью драйвера L298N
- Драйвер двигателя на микросхеме HG7881
- Подключение:
- Управление:
- Момент и потребляемый ток:
- Микросхема или плата расширения Motor Shield
- Таблица: Сравнение микросхемы L293D и платы расширения Motor Shield
- Драйвер моторов четырехканальный на двух микросхемах L293D
- Драйвер двигателя L298N
- Распиновка
- Использование драйвера L298N с Arduino
- Сравнение драйверов L298N, L293D и Arduino Motor Shield
- Драйвер L298N
- Драйвер L293D
- Arduino Motor Shield
- Пиновка микросхемы L298N
- Принцип действия H-моста в драйверах
- Подключение драйвера L293D:
- Подключение драйвера L298N:
- Видео:
- Модуль драйвера двигателей L298N и Arduino
Подключение драйвера двигателей L293D к Arduino — пошаговая инструкция с подробными схемами и кодом

Вариант подключения драйвера двигателей L293D к Arduino может быть полезным во множестве проектов, где требуется управление движением моторов. Данный драйвер, основанный на микросхеме L293D, обеспечивает удобный и надежный способ управления двигателями.
Для правильного подключения драйвера L293D к Arduino необходимо питание для моторов и источник питания драйвера. Моторы могут потреблять постоянный ток, поэтому источник питания должен обеспечивать достаточное напряжение и момент для нормальной работы двигателей. Напряжение на моторы и питание драйвера могут иметь разные значения и источники энергии.
Методы подключения драйвера L293D к Arduino
Однако, в сравнение с другим драйвером L298N, L293D имеет некоторые ограничения. L293D может питать моторы только от постоянного напряжения, в то время как L298N позволяет использовать модули с током питания до 4 А и напряжением до 46 В.
Один из вариантов подключения двигателя с использованием драйвера L293D выглядит следующим образом:
- Источник питания – подключается ко входу Vcc2 на драйвере.
Таким образом, выбрав правильные значения для входных и выходных сигналов, а также подключив необходимые источники питания, можно управлять двигателями с помощью Arduino и драйвера L293D. При этом не забывайте о сравнении с другими возможными микросхемами и драйверами, такими как L298N или HG7881, которые также часто используются для подключения и управления моторов.
Сравнение модулей для управления двигателями
При разработке проектов, которым нужно управлять двигателями, часто требуется использование специальных модулей или драйверов. В данном разделе мы рассмотрим несколько популярных модулей для управления двигателями и сравним их основные характеристики.
Модуль L293D
Модуль L293D является одним из наиболее распространенных модулей для управления двигателями. Он может управлять двумя двигателями или одним шаговым двигателем, а также обеспечивает защиту от перегрузки и джамперы для настройки направления вращения.
Модуль L293D имеет два входа для управления каждым двигателем (input1 и input2), а также два выхода (output1 и output2), которые подключаются к мотору. В зависимости от значений, подаваемых на входы, модуль управляет направлением вращения двигателя. Кроме того, модуль L293D позволяет питать двигатель от внешнего источника питания.
Модуль HG7881
Модуль HG7881 является четырехканальным драйвером для управления двигателями. Он может управлять четырьмя двигателями или двумя шаговыми двигателями. Модуль HG7881 также имеет защиту от перегрузки и возможность настройки направления вращения.
Модуль HG7881 имеет четыре входа для управления каждым двигателем (in1, in2, in3 и in4), а также четыре выхода (out1, out2, out3 и out4), которые подключаются к моторам. Для управления направлением вращения используется сочетание значений на входах модуля HG7881.
Общие характеристики модулей
Оба модуля, L293D и HG7881, являются драйверами двигателей и используются для управления постоянным источником напряжения в зависимости от потребляемого момента двигателем. Они позволяют управлять направлением вращения двигателя, а также имеют возможность торможения двигателя.
Модули подключаются к плате Arduino и можно использовать для управления различными типами двигателей. Также стоит отметить, что на основе данных микросхем можно разработать собственные платы расширения для управления большим количеством двигателей.
| Модуль | L293D | HG7881 |
|---|---|---|
| Количество каналов | 2 | 4 |
| Входы | 2 | 4 |
| Выходы | 2 | 4 |
| Защита от перегрузки | Да | Да |
| Настройка направления вращения | Да | Да |
| Питание от внешнего источника | Да | Да |
У обоих модулей есть свои преимущества и недостатки, и выбор конкретного модуля зависит от требований проекта. Но в общем случае, использование модуля L293D или HG7881 позволяет эффективно управлять двигателями при разработке проектов с Arduino.
Подключение L298N к Arduino
Описание драйвера L298N
Драйвер L298N — это H-моста драйвер, который можно использовать для управления постоянным током до 2А на каждом из его каналов. Он позволяет управлять моторами с постоянным напряжением, поэтому вы можете использовать его для подключения и управления различными типами двигателей, включая шаговые и постоянного вращения.
Подключение драйвера L298N к Arduino
- Подключите другую сторону двигателя к минусу вашего источника питания.
- Подключите источник питания драйвера L298N к плате Arduino. Вы можете использовать отдельный источник питания для драйвера или использовать питание Arduino, но убедитесь, что его мощность достаточна для питания драйвера и двигателей.
Управление двигателями с помощью драйвера L298N
Драйвер двигателя на микросхеме HG7881
На входе микросхемы HG7881 мы можем подавать управляющий сигнал напрямую с Arduino, что существенно упрощает подключение. Время вращения двигателя на данном драйвере можно задавать с точностью до секунды, что также является большим преимуществом.
Давайте разберемся, как подключить этот драйвер к Arduino. На основе схемы подключения и таблицы действий в зависимости от направления вращения двигателя, можно легко настроить ваш проект.
Подключение:
Для подключения микросхемы HG7881 к Arduino нам понадобятся следующие компоненты:
- Микросхема HG7881
- Arduino (например, Arduino Uno)
- Двигатель или шаговый двигатель
- Источник питания (например, батарейка)
На примере подключения двигателя:
- VMotor и VCC микросхемы HG7881 подключаются к источнику питания (например, батарейке).
Напряжение питания двигателя или шагового двигателя должно быть не больше напряжения, подаваемого на VMotor и VCC.
Управление:
Микросхема HG7881 имеет двоичный входной регистр (IN1 и IN2) для управления направлением вращения двигателя. В таблице ниже представлены действия в зависимости от состояния регистра:
| IN1 | IN2 | Действие |
|---|---|---|
| High | High | Торможение двигателя |
| High | Low | Вращение двигателя в одну сторону |
| Low | High | Вращение двигателя в другую сторону |
| Low | Low | Неопределенное состояние |
Таким образом, мы можем управлять направлением вращения двигателя, изменяя состояние регистра IN1 и IN2 в коде Arduino.
Момент и потребляемый ток:
В микросхемах HG7881 максимальный ток двигателя зависит от величины напряжения питания VMotor и VCC. В таблице ниже можно увидеть зависимость потребляемого тока от различных напряжений:
| Напряжение питания (V) | Максимальный ток (А) |
|---|---|
| 2.5 | 0.60 |
| 5.0 | 1.1 |
| 6.5 | 1.4 |
| 9.0 | 2.6 |
| 12.0 | 3.2 |
Важно отметить, что при использовании драйвера HG7881 возможно торможение двигателя. Это достигается установкой обоих входных регистров в состояние High. В результате двигатель будет моментально останавливаться при изменении направления вращения или отключении питания.
Даже если вам требуется управлять двумя двигателями и драйвер L293D может позволить это сделать, микросхема HG7881 также может быть хорошим вариантом для вашего проекта. Благодаря простоте подключения и возможности настройки времени вращения, этот драйвер хорошо зарекомендовал себя во многих DIY-проектах.
Микросхема или плата расширения Motor Shield
Для подключения и управления двигателями к Arduino существует несколько вариантов. В данном проекте мы рассмотрим использование микросхемы L293D или платы расширения Motor Shield. Оба варианта обеспечивают возможность подключения двигателей и управления их вращением, а также смены направления движения и торможение.
Микросхема L293D – это двухканальный H-мост, который позволяет управлять двумя двигателями с помощью Arduino. Она может использоваться для управления постоянного и шаговыми двигателями, источник питания которых не превышает 36 В.
Плата расширения Motor Shield, напротив, представляет собой уже готовое решение для подключения и управления моторами с двумя микросхемами L293D или одной микросхемой L298N. Она позволяет подключать до четырех двигателей и обеспечивает возможность управления скоростью и направлением вращения каждого двигателя.
Для подключения моторов к этим микросхемам или платам расширения обычно используются драйверы двигателя. Драйверы обеспечивают достаточное напряжение и ток для питания моторов, а также защиту от токовых скачков и коротких замыканий.
Управление платой расширения Motor Shield и микросхемой L293D происходит с помощью Arduino. Для этого необходимо подключить ардуино к плате расширения или микросхеме с помощью соединительных проводов и установить необходимые программные библиотеки.
Таблица: Сравнение микросхемы L293D и платы расширения Motor Shield
| Характеристика | L293D | Motor Shield |
|---|---|---|
| Количество моторов | 2 | 4 |
| Управление скоростью | Нет | Да |
| Управление направлением | Да | Да |
| Источник питания моторов | Внешний | Arduino |
| Используемые драйверы | HG7881 | L293D или L298N |
В зависимости от требуемой функциональности и количества подключаемых двигателей, можно выбрать либо микросхему L293D, либо плату расширения Motor Shield. Оба варианта подходят для различных проектов, где нужно управлять двигателями, и каждый из них имеет свои преимущества.
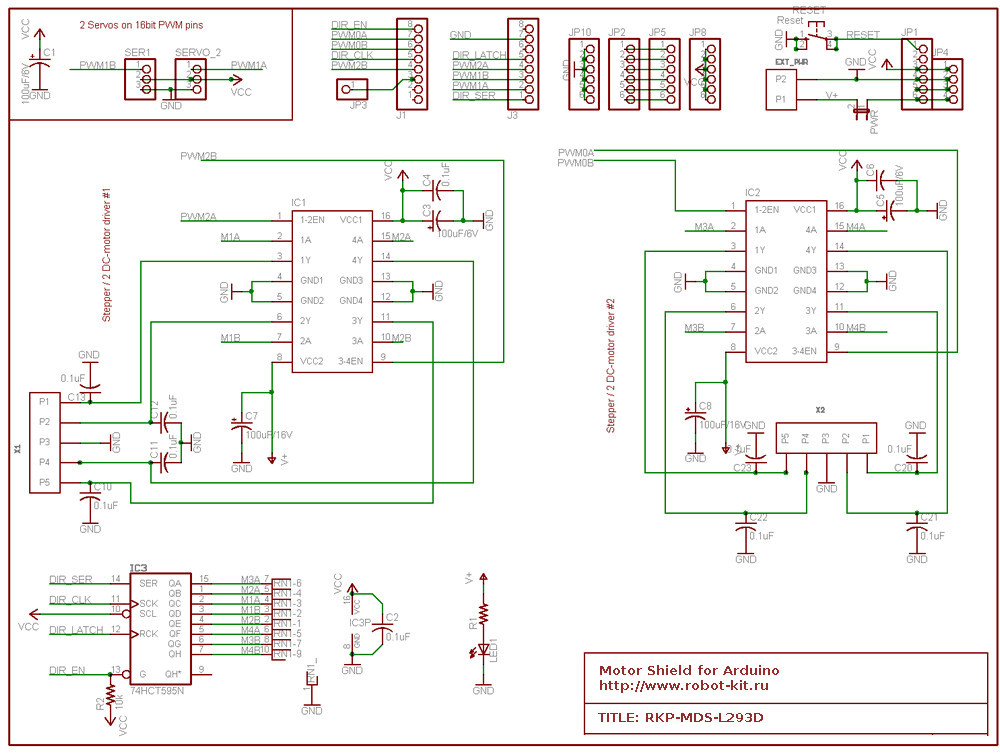
Драйвер моторов четырехканальный на двух микросхемах L293D
Распиновка драйвера L293D позволяет управлять шаговыми двигателями и моторами постоянного тока. Базой для подключения драйвера может быть Arduino или другая плата микроконтроллера. Для управления драйвером и двигателем шагового мотора необходимо настроить направление вращения и количество шагов, которые нужно сделать.
Этот драйвер моторов позволяет управлять двигателями по направлению и скорости вращения. За счет использования подключаемых микросхем L293D, Arduino может управлять множеством моторов одновременно.
Разберем подключение конкретного варианта драйвера L293D к Arduino:
Тогда вы сможете использовать драйвер L293D для управления двигателем и настроить его работу в соответствии с вашими потребностями.
Драйвер двигателя L298N
Принцип работы драйвера L298N основан на использовании микросхемы L298N, которая содержит H-мосты. H-мост — это устройство, позволяющее управлять направлением вращения и скоростью двигателя.
Для питания двигателей и модуля L298N используется постоянное напряжение. Для питания моторов предусмотрено два входа VMotor1 и VMotor2, и этот вариант позволяет питать моторы независимо от Arduino.
Распиновка
- IN1 — управляющий вход 1;
- IN2 — управляющий вход 2;
- IN3 — управляющий вход 3;
- IN4 — управляющий вход 4;
- OUT1 — выход 1;
- OUT2 — выход 2;
- OUT3 — выход 3;
- OUT4 — выход 4;
- ENA — скорость вращения двигателя 1;
- ENB — скорость вращения двигателя 2;
- VMotor1 — питание двигателя 1;
- VMotor2 — питание двигателя 2.
Использование драйвера L298N с Arduino
Для подключения драйвера L298N к Arduino, необходимо понять принцип его работы и особенности управления. В основе управления лежит подача сигналов на управляющие входы IN1, IN2, IN3 и IN4, с помощью которых задается направление вращения и скорость двигателей.
Чтобы двигатели вращались, нужно подать низкий уровень (LOW) на соответствующие управляющие входы IN1 и IN4, и высокий уровень (HIGH) на управляющие входы IN2 и IN3. После установки правильного направления вращения и скорости двигателей, они начнут вращаться.
Для торможения двигателей можно использовать соответствующую комбинацию сигналов: низкий уровень на IN1 и IN2, и высокий уровень на IN3 и IN4. Также возможно изменение направления вращения путем изменения состояния управляющих входов.
Важно отметить, что максимальная скорость двигателя ограничена питанием, поэтому необходимо подобрать подходящее напряжение питания для достижения нужной скорости.
Вот простой пример кода Arduino для управления двигателями с помощью L298N:
const int enaPin = 5; // ШИМ-выход для ENA
const int in1Pin = 2; // Управляющий вход IN1
const int in2Pin = 3; // Управляющий вход IN2
const int enbPin = 6; // ШИМ-выход для ENB
const int in3Pin = 4; // Управляющий вход IN3
const int in4Pin = 7; // Управляющий вход IN4
void setup() {
pinMode(enaPin, OUTPUT);
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(enbPin, OUTPUT);
pinMode(in3Pin, OUTPUT);
pinMode(in4Pin, OUTPUT);
}
void loop() {
// Установка направления вращения двигателей
digitalWrite(in1Pin, LOW); // Направление 1
digitalWrite(in2Pin, HIGH); // Направление 1
digitalWrite(in3Pin, LOW); // Направление 2
digitalWrite(in4Pin, HIGH); // Направление 2
analogWrite(enaPin, 255); // Скорость вращения 1
analogWrite(enbPin, 255); // Скорость вращения 2
delay(2000); // Движение вперед на 2 секунды
// Торможение двигателей
digitalWrite(in1Pin, HIGH); // Торможение 1
digitalWrite(in2Pin, HIGH); // Торможение 1
digitalWrite(in3Pin, HIGH); // Торможение 2
digitalWrite(in4Pin, HIGH); // Торможение 2
delay(1000); // Торможение на 1 секунду
// Смена направления вращения двигателей
digitalWrite(in1Pin, HIGH); // Направление 1
digitalWrite(in2Pin, LOW); // Направление 1
digitalWrite(in3Pin, HIGH); // Направление 2
digitalWrite(in4Pin, LOW); // Направление 2
delay(2000); // Движение назад на 2 секунды
// Остановка двигателей
digitalWrite(in1Pin, LOW); // Остановка 1
digitalWrite(in2Pin, LOW); // Остановка 1
digitalWrite(in3Pin, LOW); // Остановка 2
digitalWrite(in4Pin, LOW); // Остановка 2
delay(1000); // Ожидание 1 секунды
}
В данном примере мы управляем двумя моторами, устанавливая направление вращения и скорость с помощью программы Arduino.
Использование драйвера L298N позволяет управлять двигателями в различных проектах, где необходимо обеспечить вращение моторов и контролировать их скорость и направление.
Сравнение драйверов L298N, L293D и Arduino Motor Shield
Во многих проектах, связанных с управлением двигателями, часто возникает необходимость в использовании дополнительных модулей, таких как драйверы. Драйверы позволяют управлять скоростью, направлением вращения, а также обеспечивают защиту от перегрузок и короткого замыкания. В этом разделе мы рассмотрим сравнение трех популярных драйверов: L298N, L293D и Arduino Motor Shield.
Драйвер L298N
Драйвер L298N — это мощный драйвер двигателей, и он обладает следующими особенностями:
- Может управлять двумя постоянными токовыми моторами (DC) или одним двигателем шагового движения (Stepper) с помощью H-моста.
- Подключение к Arduino осуществляется через микросхему L298N.
- Может использоваться для управления двигателями с нагрузкой до 2А на самой микросхеме, и до 4А с использованием внешнего источника питания.
- Входы IN1, IN2, IN3 и IN4 на микросхеме L298N позволяют управлять направлением движения и скоростью вращения двигателя.
- Схема торможения (BRAKE) и осуществление плавного вращения мотора также поддерживаются.
Драйвер L293D
Драйвер L293D — это более простой и доступный драйвер двигателей, отличающийся от L298N следующими особенностями:
- Может управлять двумя постоянными токовыми моторами (DC) с помощью H-моста.
- Подключение к Arduino осуществляется через микросхему L293D.
- Можно использовать внешний источник питания для двигателей с нагрузкой до 600 мА.
- Входы IN1, IN2, IN3 и IN4 на микросхеме L293D используются для управления направлением вращения мотора и его скоростью.
- Торможение и плавное вращение мотора не поддерживаются.
Arduino Motor Shield

Arduino Motor Shield — это дополнительный модуль, разработанный специально для Arduino, и он имеет следующие характеристики:
- Может управлять двумя постоянными токовыми моторами (DC) или одним двигателем шагового движения (Stepper).
- Подключение к Arduino осуществляется непосредственно на плате.
- Моторы могут быть питаны как от Arduino (до 1А на мотор), так и от внешнего источника питания (до 2A на мотор).
- Управление направлением и скоростью моторов осуществляется через регистр на плате Arduino Motor Shield.
- Поддерживается смена направления и плавное вращение моторов.
В итоге, выбор драйвера зависит от многих факторов, включая требования к проекту: мощность двигателей, способ подключения, возможность плавного вращения и торможения. Надеемся, что наше сравнение поможет вам сделать правильный выбор!
Пиновка микросхемы L298N
Микросхема L298N представляет собой двухканальный драйвер H-моста, который позволяет управлять двигателями на базе принципа действия H-моста. На плате данной микросхемы имеется два H-моста, каждый из которых может управлять двумя моторами. Мы можем использовать эту микросхему для управления двигателями на Arduino.
Микросхема L298N имеет следующую пиновку:
- IN1, IN2 — входы для управления первым H-мостом;
- IN3, IN4 — входы для управления вторым H-мостом;
- ENA, ENB — входы для управления скоростью вращения моторов;
- GND — заземление;
- OUT1, OUT2, OUT3, OUT4 — выходы для подключения двигателей;
- VCC — вход для подключения источника питания микросхемы;
- 5V — выход для подключения источника питания моторов;
- 12V — вход для подключения источника питания моторов.
Используя эту пиновку, мы можем подключить моторы к этой микросхеме и управлять их движением с помощью Arduino. На плате L298N также есть возможность настройки функций торможения и направления движения моторов.
Вот пример подключения моторов к плате L298N:
«`html
Микросхема L298N имеет следующую пиновку:
H-мост L298N предназначен для управления двигателями и используется в различных модулях и щитах для Arduino. Подключив этот модуль к Arduino, можно управлять двигателями по направлению вращения и точки остановки, а также задавать скорость вращения. L298N работает с моторами постоянного тока и может управлять двумя моторами одновременно.
| Назначение | |
|---|---|
| VCC | Вход питания 5 В |
| 3.3 V | Выход питания 3.3 В для других устройств |
| GND | Заземление |
| EN1 | Вход управления мотором 1 |
| EN2 | Вход управления мотором 2 |
| IN1 | Вход управления направлением 1 |
| IN2 | Вход управления направлением 2 |
| IN3 | Вход управления направлением 3 |
| IN4 | Вход управления направлением 4 |
Принцип действия H-моста в драйверах
В данном варианте подключения драйверов L293D и L298N к Arduino используются два H-моста, один для управления двигателем в одном направлении, а другой — для управления двигателем в противоположном направлении. При использовании L293D драйвера подключение осуществляется простым размещением джамперов на плате драйвера, а при использовании L298N драйвера требуется подключение к внешнему источнику питания.
Подключение драйвера L293D:

- Подключите питание к плате драйвера. Драйвер может быть питан от источника напряжения в диапазоне от 5 до 36 вольт. Важно подключать источник питания с учетом потребляемого двигателем тока.
Подключение драйвера L298N:
- Подключите питание к внешнему источнику, например, батарее или адаптеру постоянного тока. Диапазон рабочего напряжения L298N составляет от 7 до 35 вольт.
Видео:
Модуль драйвера двигателей L298N и Arduino
Модуль драйвера двигателей L298N и Arduino by arduinoLab 42,497 views 9 years ago 2 minutes, 54 seconds