- Практические схемы управления шаговыми двигателями. Часть 2 — особенности и рекомендации
- Практические схемы управления шаговыми двигателями
- Плюсы использования биполярных шаговых двигателей:
- Плюсы использования униполярных шаговых двигателей:
- Часть 2: особенности и рекомендации
- Особенности двигателей
- Схемы управления
- Рекомендации
- Фазовые схемы шаговых двигателей
- Микрошаговое управление
- Возможности программного управления
- Проводные и беспроводные интерфейсы
- Рекомендации по выбору схемы управления
- 1. Тип двигателя
- 2. Уровень мощности
- 3. Схема управления
- 4. Включение обмоток
- 5. Генератор импульсов
- Видео:
- Фонарик из шагового двигателя. Часть 2
Практические схемы управления шаговыми двигателями. Часть 2 — особенности и рекомендации

Разработка эффективных и надежных схем управления шаговыми двигателями является важной задачей для многих инженеров и электронщиков. Однако, из-за большого количества типов двигателей, а также разнообразия их характеристик, выбор оптимальной схемы не всегда является простой задачей.
Один из самых популярных типов двигателей, который широко используется в различных областях применения, таких как робототехника, автоматизация и промышленная автоматика, — это шаговые двигатели. Однако, как и любое электронное устройство, они имеют свои особенности и требуют специфического подхода при проектировании схемы управления.
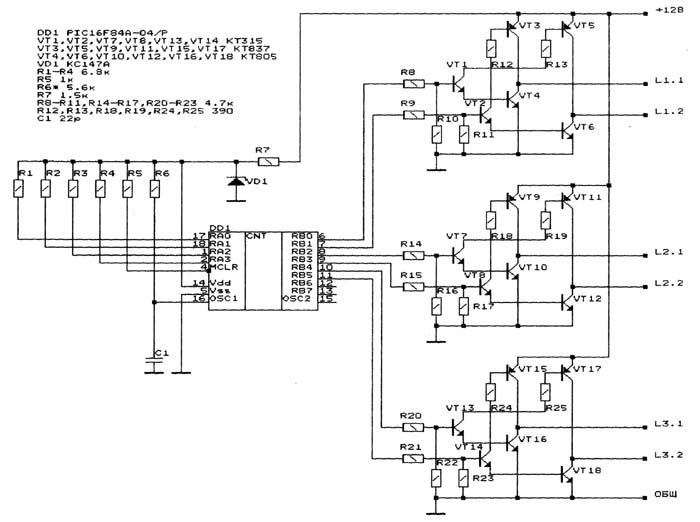
На рисунке, приведенном ниже, показана принципиальная схема управления шаговым двигателем с использованием униполярного драйвера:
Рисунок: Принципиальная схема управления шаговым двигателем с использованием униполярного драйвера
Для управления шаговыми двигателями часто используются специализированные драйверы, которые позволяют легко и точно задавать направление вращения, момент удержания и уровень мощности. Одним из таких драйверов является униполярный драйвер, который позволяет делать это с помощью логического сигнала.
Важной задачей при управлении шаговыми двигателями является определение необходимого уровня мощности, который требуется для выполнения задачи. При этом необходимо обратить внимание на тип двигателя и его характеристики, такие как тип ротора и количество обмоток. Наиболее распространенными типами шаговых двигателей являются униполярные и биполярные.
Практические схемы управления шаговыми двигателями
На рисунке 1 показана схема управления биполярным шаговым двигателем. В этой схеме используется драйвер, который осуществляет коммутацию обмоток двигателя в нужном порядке поступающих логических импульсов. Драйвер состоит из коммутатора, который задает направление вращения ротора, и микросхемы управления, которая подает сигналы уровня напряжения на обмотки двигателя. Момент ротора задается с помощью задачи коллектором.
Если вам необходимо реализовать управление маломощными шаговыми двигателями, то можно использовать схему, приведенную на рисунке 2. В этой схеме используется драйвер mitsumi rdcon, который позволяет задавать момент ротора с помощью напряжения, подаваемого на обмотки двигателя. Этот драйвер имеет ряд преимуществ, таких как легкость в использовании, возможность измерения момента и выполнения осциллограммы момента ротора.
Плюсы использования биполярных шаговых двигателей:
- Большой мощности
- Высокий момент ротора
- Возможность точного позиционирования
Плюсы использования униполярных шаговых двигателей:
- Простая схема управления
- Низкая стоимость
- Высокая надежность
Важно отметить, что в схемах управления шаговыми двигателями часто применяются диоды, которые защищают драйвер от обратных напряжений, появляющихся при отключении обмоток. Также, в задаче управления двигателем особое внимание следует уделить выбору драйвера и правильной настройке уровня напряжения подачи сигнала на обмотки.
Часть 2: особенности и рекомендации
В предыдущей части мы рассмотрели основные принципы работы шаговых двигателей и различные схемы их управления. Теперь мы рассмотрим особенности и рекомендации по использованию этих схем.
Особенности двигателей
Шаговые двигатели могут быть двух типов: биполярные и униполярные. Биполярные двигатели обладают более высокой мощностью и моментом вращения, но требуют использование более сложных схем управления и драйверов. Униполярные двигатели, в свою очередь, могут работать с меньшими напряжениями, но имеют более сложную схему подключения и меньшую мощность.
Один из наиболее распространенных типов шаговых двигателей — это моторы серии SPM-20 от компании Mitsumi. Они позволяют легко выполнить точное позиционирование ротора благодаря осциллограмме сигнала управления.
Схемы управления
Для управления шаговыми двигателями используются различные схемы, основанные на использовании логического генератора, драйвера и ключа. Включение и реверсом ротора может быть задано с помощью уровня логического сигнала.
В схеме автора на сайте приведена схема управления биполярным шаговым двигателем с использованием двух диодов, резистора и ключа. Этот тип схемы позволяет управлять двигателем без необходимости специализированных драйверов.
Для управления униполярным двигателем в режиме позиционирования можно использовать схему с указанием временной мощности и задачи момента.
Рекомендации
При использовании схем управления шаговыми двигателями рекомендуется учитывать следующие особенности:
- Выбор типа двигателя (биполярный или униполярный) зависит от требуемой мощности и момента вращения. Также следует учесть сложность схемы и требования к драйверам.
- При использовании униполярных двигателей важно правильно подключить схему управления, чтобы получить требуемые значения мощности и момента.
- Для точного позиционирования ротора шагового двигателя можно использовать указание временной мощности и задачи момента.
Использование шаговых двигателей в различных устройствах, например, в дисководах, позволяет легко осуществить вращение ротора благодаря простой и эффективной схеме управления.
|
| Рисунок: схема управления шаговым двигателем |

Этот рисунок демонстрирует схему управления шаговым двигателем с использованием диодов, резистора и ключа. Благодаря этой схеме можно легко контролировать включение и реверс ротора.
Фазовые схемы шаговых двигателей
Для управления биполярными шаговыми двигателями требуется использовать более сложные схемы, так как они имеют два уровня напряжения на обмотках. Наиболее распространенной схемой является схема L/RDCON, где каждая обмотка двигателя подключается через ключ L к внешней постоянной мощности и резистору R. Путем включения ключей в различные комбинации и изменения соотношения между L и R можно достичь необходимого режима вращения двигателя.
Рисунок наиболее часто используемого драйвера MITSUMI SPM-20 позволяет наглядно представить использование фазовых ключей и временную диаграмму изменения уровня тока в обмотках двигателя.
В качестве генератора импульсов для шаговых двигателей можно использовать специализированные интегральные схемы, такие как RDCON и SPM-20. Они позволяют легко и точно задавать необходимое количество и продолжительность импульсов. Для маломощных задач, например, в дисководах, часто можно использовать логический генератор, такой как RDCON. В случае большой мощности или необходимости более точного управления, лучше использовать специализированные генераторы импульсов, такие как SPM-20 или аналогичные.
Осциллограммы управления шаговыми двигателями с различными фазовыми схемами позволяют наглядно продемонстрировать различия в изменении уровня тока в обмотках и соответствующие изменения момента вращения ротора двигателя.
Наряду с фазовыми схемами, важное значение в управлении шаговыми двигателями имеет также правильный подбор драйвера и его настройка. Рекомендуется обратить внимание на характеристики драйвера, такие как максимальный ток и напряжение, а также его возможности по настройке различных режимов работы. Это позволит оптимально использовать двигатель и добиться требуемого уровня точности и момента вращения.
Микрошаговое управление
В микрошаговом режиме двигатель управляется с помощью специального сигнала, который представляет собой электрическую осциллограмму. Наиболее распространенными типами сигналов микрошагового управления являются синусоидальные и псевдосинусоидальные сигналы.
Для получения сигнала микрошагового управления наиболее часто используются коммутаторы – специальные устройства, которые переключают обмотки шагового двигателя в нужном порядке с заданными задержками. Это позволяет управлять током в обмотках и направлением вращения ротора.
Один из примеров схемы микрошагового управления показан на рисунке ниже:

На рисунке видно, что сигнал микрошагового управления генерируется с помощью генератора импульсов и таймера. Непосредственно управление током в обмотках двигателя реализуется через драйвер, который управляет мощностью и напряжением, подаваемыми на обмотки. Для уменьшения мощности, потребляемой шаговым двигателем, в схеме используется резистор, который разряжает обмотки при отсутствии сигнала. Это позволяет уменьшить энергопотребление и повысить эффективность.
Микрошаговое управление особенно полезно для шаговых двигателей в режиме позиционирования, когда требуется высокая точность и плавность перемещений. В таких применениях микрошаговое управление позволяет снизить шум и вибрацию, улучшить плавность движения и повысить точность позиционирования.
Управление шаговыми двигателями в микрошаговом режиме делает возможным реализацию различных функций, таких как контроль скорости и ускорения, применение реверсом и удержания путем изменения тока в обмотках через ключи и ротор двигателя. Микрошаговое управление позволяет также снизить влияние дисководах шаговых двигателей на мощность и точность позиционирования.
Возможности программного управления
Программное управление шаговыми двигателями предоставляет широкий спектр возможностей для достижения точности и гибкости в работе системы. Существует несколько специализированных схем управления, которые позволяют легко реализовать различные режимы работы и функции.
Одним из ключевых преимуществ программного управления является возможность задавать направление вращения двигателя путем изменения последовательности импульсов, подаваемых на обмотки. Например, для двигателей типа RDCON или SPM-20 используется коммутатор, который изменяет комбинацию логического уровня сигналов на обмотках, определяя направление вращения ротора.
Еще одной важной возможностью программного управления является изменение скорости вращения двигателя путем изменения частоты и продолжительности импульсов. Это делается путем изменения мощности и длительности импульсов напряжения, подаваемых на обмотки. Например, при использовании схемы с делителем частоты и ключа со специальной регулировкой длительности импульсов можно увеличить или уменьшить скорость вращения.
Программное управление также позволяет реализовать режимы позиционирования и удержания. Для этого используется возможность задать количество шагов двигателя, а также специальные сигналы реверса и рестарта, которые меняют направление вращения и возвращаются к начальной позиции соответственно.
Для обеспечения точности позиционирования и предотвращения возможных ошибок, связанных с некорректным пропуском шагов, рекомендуется использовать датчики положения ротора, такие как датчики Холла или оптические энкодеры. Эти датчики могут быть подключены к контроллеру и передавать информацию о текущем положении.
- Возможность программного управления позволяет осуществлять точное позиционирование и удержание шагового двигателя.
- Изменение направления вращения и скорости двигателя достигается изменением последовательности импульсов на обмотках.
- Программное управление предлагает различные режимы работы, включая позиционирование, реверс и рестарт.
- Для увеличения точности и предотвращения ошибок рекомендуется использовать датчики положения ротора.
- Программное управление также позволяет легко настроить параметры работы двигателя, такие как частота и длительность импульсов.
- Существуют различные специализированные схемы управления для реализации программного управления шаговыми двигателями.
Проводные и беспроводные интерфейсы

Драйвер шагового двигателя отличается высоким моментом управления, возможностью регулировать ток обмоток, и применяется для включения и управления двигателем. Он способен генерировать различные сигналы и импульсы, которые необходимы для правильной работы двигателя.
Для более эффективного использования шаговых двигателей многие драйвера обладают возможностью регулировки момента и тока, что позволяет уменьшить мощность, потребляемую двигателем. Это особенно полезно при использовании шаговых двигателей малой мощности.
Одним из распространенных типов драйверов является биполярный драйвер, который позволяет управлять двумя обмотками двигателя. Другой тип драйвера — униполярный, который позволяет управлять четырьмя обмотками двигателя.
Для управления шаговыми двигателями в схеме используются различные элементы, такие как диоды, резисторы и ключи реверсом. Ключ реверсом позволяет изменить направление вращения ротора двигателя. Диоды необходимы для защиты от обратного напряжения, возникающего при отключении обмоток двигателя.
Для более точного позиционирования двигателей, часто используется логическое программирование. Это позволяет задать требуемые уровни напряжения и импульсов, необходимых для перемещения двигателя в определенную позицию.
При управлении шаговыми двигателями в режиме удержания мощность потребляемого тока может быть снижена до постоянного уровня, что уменьшает нагревание двигателя. Для этого можно использовать временную схему, которая будет активироваться при необходимости удержания позиции.
Проводные интерфейсы, такие как SPI, I2C и UART, часто используются для коммуникации между микроконтроллером или компьютером и драйвером шагового двигателя. Это позволяет легко управлять двигателем посредством программного управления.
Беспроводные интерфейсы, такие как Wi-Fi и Bluetooth, становятся все более популярными в управлении шаговыми двигателями. Они позволяют удаленно управлять двигателем с использованием мобильного устройства или компьютера. Такой подход особенно удобен, если необходимо управлять несколькими двигателями одновременно или если двигатель находится в месте, к которому трудно добраться проводным интерфейсом.
Рекомендации по выбору схемы управления
При выборе схемы управления шаговыми двигателями следует учитывать ряд особенностей и рекомендаций:
1. Тип двигателя
В зависимости от задачи необходимо выбрать подходящий тип шагового двигателя. Для небольших по мощности применяются одно- и двухфазные шаговые двигатели, а для более мощных — трехфазные.
2. Уровень мощности
Если требуется управлять маломощными шаговыми двигателями, то часто используются специализированные драйвера, которые позволяют сократить потребление энергии и эффективно управлять двигателем.
3. Схема управления
Наиболее распространенными схемами управления шаговыми двигателями являются однофазная и двухфазная схемы. Однако, существуют и другие специфические схемы, которые могут быть применены в зависимости от конкретной задачи.
4. Включение обмоток
При включении обмоток шагового двигателя следует учитывать ряд особенностей. Например, в режиме уменьшения тока в обмотке можно использовать резисторы и диоды для предотвращения повреждения ключей и обмоток.
5. Генератор импульсов
Для управления шаговым двигателем необходим генератор импульсов, задающий частоту и направление вращения ротора. Этот генератор может быть выполнен в виде специализированной платы или программно на микроконтроллере.
В процессе выбора схемы управления шаговыми двигателями рекомендуется обратить внимание на наиболее подходящие схемы и компоненты, учитывая особенности конкретной задачи и требования к уровню мощности.
Видео:
Фонарик из шагового двигателя. Часть 2
Фонарик из шагового двигателя. Часть 2 by Паяльник TV 63,139 views 7 years ago 12 minutes, 30 seconds