- Сервоприводы — от подключения до управления — основные принципы, примеры работы и полное руководство
- Подключение сервоприводов
- Управление сервоприводами
- Примеры работы сервоприводов
- Особенности настройки сервоприводов
- Технические аспекты сервоприводов
- Интерфейс управления
- Управление сервоприводом при помощи Arduino
- Управление сервоприводом с помощью Raspberry Pi
- Видео:
- servo sg90 Подключение серво и управление с телефона
Сервоприводы — от подключения до управления — основные принципы, примеры работы и полное руководство

Сервоприводы – это электромеханические устройства, которые широко используются в робототехнике и автоматизации для точного управления движением. Они состоят из органа управления, сердечником и пластиковыми элементами, которые установлены на валу. Сервоприводы обычно подключены к управляющей плате посредством импульсов, что позволяет им точно контролировать положение, скорость и ускорение.
Основными преимуществами сервоприводов являются их высокая точность позиционирования, момент поворота и скорость. Благодаря бесколлекторным моторам они работают более плавно и тише, чем сервоприводы с постоянными электромоторами. Однако существует ограничение в количестве подключаемых сервоприводов к одной плате, обусловленное ограниченной частотой сигнала управления. Обычно можно подключить лишь несколько десятков сервоприводов.
Для управления сервоприводами чаще всего используется алгоритм, который генерирует внутренний сигнал с заданной частотой. Этот сигнал отправляется на управляющую плату, которая в свою очередь посылает импульсы на сервоприводы. Сигнал состоит из серии импульсов, каждый из которых определяет требуемую позицию сервопривода. Ширина импульса определяет эту позицию, и частота импульсов определяет скорость и ускорение перемещения сервопривода.
Для более удобного управления сервоприводами существует множество библиотек и программных платформ, таких как Arduino и Espruino. Например, библиотека Servo в Arduino позволяет просто и быстро управлять сервоприводами. Она имеет множество функций для контроля позиции, скорости и ускорения сервопривода. Аналогичным образом работает библиотека Servo2 в Espruino.
При выборе сервоприводов необходимо обратить внимание на их характеристики, такие как диапазон вращения, момент поворота, скорость и потребляемую мощность. Кроме того, стоит учесть, что сервоприводы могут использоваться с различными типами редукторов, например с пластиковыми или шестерневыми. Также следует учесть требования по питанию и интерфейсу подключения к управляющей плате.
Подключение сервоприводов
Подключение сервоприводов к плате Arduino или Raspberry Pi зависит от используемой библиотеки и форм-фактора сервопривода. Сервоприводы обычно имеют два подключения: одно для питания (обычно 5 В) и другое для управления.
Скорость вращения и момент сервопривода зависят от используемой управляющей шестерни. На выбор предлагаются сервоприводы с различными характеристиками, чтобы удовлетворить требования разных проектов.
Для подключения сервоприводов к плате Arduino можно использовать библиотеку Servo.h. В примере ниже показано, как подключить сервопривод к пину 9:
#include <Servo.h>
Servo servo1;
void setup() {
servo1.attach(9); // Прикрепляем сервопривод к пину 9
}
void loop() {
servo1.write(90); // Подаём сигнал длительностью 1.5 мс (угол 90 градусов)
delay(1000);
servo1.write(180); // Подаём сигнал длительностью 2 мс (угол 180 градусов)
delay(1000);
}Для подключения сервоприводов к плате Raspberry Pi рекомендуется использовать альтернативные библиотеки, такие как ServoBlaster или RPIO.PWM. Пример кода для управления сервоприводом с использованием библиотеки ServoBlaster:
echo 0=100% > /dev/servoblaster # Устанавливаем скорость 100% (максимальный угол)
echo 0=50% > /dev/servoblaster # Устанавливаем скорость 50% (средний угол)
echo 0=0% > /dev/servoblaster # Устанавливаем скорость 0% (минимальный угол)Для управления сервоприводами также можно использовать языки программирования Python, JavaScript (с использованием библиотеки pigpio) и другие, в зависимости от платформы и требований проекта.
При использовании сервоприводов необходимо учитывать их характеристики, такие как частота модуляции (обычно 50 Гц), выходной момент и максимальное количество подключаемых сервоприводов. Также следует обратить внимание на изнашивание сервоприводов при длительной работе, особенно если они используются для удерживания определенного положения или работают с высокой скоростью вращения.
Примеры работы с сервоприводами могут быть найдены в официальной документации Arduino, Raspberry Pi или в различных онлайн-ресурсах, таких как GitHub или Arduino Project Hub.
Управление сервоприводами
Сервоприводы это механизмы, которые преобразуют электрический сигнал в механическое движение. Они имеют внутренний контроллер, который управляет двигателем, шестернями и при необходимости, платой управления.
Существует множество типов сервоприводов, но чаще всего их можно разделить на коллекторные и бесколлекторные моторы. Коллекторные сервоприводы имеют угловую скорость до 300 оборотов в минуту, а бесколлекторные сервоприводы могут достигать значительно большей скорости — до 3000 оборотов в минуту.
Для управления сервоприводами можно использовать различные платы и контроллеры. Один из известных примеров — Arduino, которая может управлять сервоприводами с помощью алгоритма шим (Широтно-импульсной модуляции) и выходных ШИМ-сигналов. Raspberry Pi также может использоваться для управления сервоприводами, используя различные методы, такие как модуляция частоты импульсов или виртуальная проводка (VirtualWire).
Подключение сервоприводов к управляющей плате может варьироваться в зависимости от характеристик каждого сервопривода. Каждый сервопривод имеет свои требования к питанию, длительности и частоте поворота, а также к положению выходного вала и другим характеристикам. Обычно для управления используется алгоритм обратной связи, который контролирует положение сервопривода в реальном времени и корректирует его, если оно отличается от заданного.
При использовании сервоприводов следует также учитывать материалы, из которых они изготовлены. Некоторые сервоприводы имеют корпус из пластика, который может стать причиной износа и поломки сервопривода при сильных нагрузках или больших частотах вращения. Для повышения надежности и долговечности рекомендуется использовать сервоприводы с корпусом из металла или других прочных материалов.
| Типы сервоприводов | Характеристики | Пример использования |
|---|---|---|
| Коллекторные сервоприводы | Низкая скорость вращения, обычно до 300 об/мин | Управление движением робота или манипулятора с точностью позиционирования |
| Бесколлекторные сервоприводы | Высокая скорость вращения, до 3000 об/мин | Использование в моделях RC-самолетов, квадрокоптеров и прочих устройствах, где требуется высокая скорость и мобильность |
Управление сервоприводами имеет свои особенности. Например, при управлении двух сервоприводами, для каждого момента времени нужно указывать их позицию, что может быть неприемлемым при использовании слишком большого количества сервоприводов. Альтернативной является использование позиционера, который обеспечивает управление группой сервоприводов одновременно.
Примеры работы сервоприводов
Сервоприводы обычно подключаются к микроконтроллеру или одноплатному компьютеру, такому как Raspberry Pi, с помощью интерфейса, который посылает соответствующие импульсы для управления позиционером. Ограничение перемещения накладывается внутри сервопривода, обеспечивая удерживание объекта в определенной позиции.
Одни из самых распространенных сервоприводов имеют пластиковые корпуса и специальный форм-фактор. Они подключены к контроллеру с помощью шлейфа и питаются от источника переменного или постоянного тока. Частота, с которой посылаются сигналы, зависит от требуемой скорости и точности вращения ротора. Сервоприводы с постоянным моментом вращения и скоростью обычно имеют сердечник из материала с магнитной проницаемостью, которая зависит от направления текущей установки сервопривода.
Одной из альтернативных библиотек для управления сервоприводом является библиотека Pi Servo. Она проста в использовании и обеспечивает элементы управления, такие как установка длительности импульса, который посылается для работы сервопривода. Идентичный эффект может быть достигнут с использованием библиотек pulse-analogWrite или pigpio.
| Характеристики |
|---|
| Мощность питания |
| Диапазон вращения |
| Обратная связь |
| Момент вращения |
| Скорость вращения |
Каждый сервопривод имеет свои уникальные характеристики, которые важно учесть при выборе сервопривода для конкретных задач. Результаты устройства зависят от качества сервопривода и использования соответствующих библиотек управления.
Особенности настройки сервоприводов
Одной из главных характеристик сервоприводов является их диапазон перемещения. Он определяется количеством градусов, на которые может поворачиваться сервопривод. Для большинства сервоприводов диапазон составляет от 0 до 180 градусов. Однако, существуют и сервоприводы с более широким диапазоном перемещения.
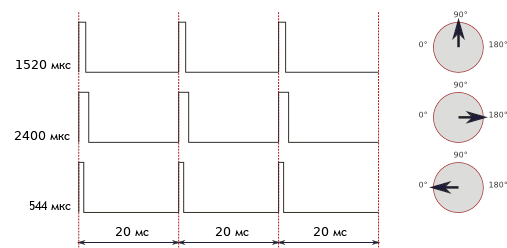
Управление сервоприводами осуществляется с помощью управляющего сигнала. Сигнал представляет собой посылаемую микроконтроллером последовательность импульсов, длительность которых определяет положение сервопривода. Обычно, длительность импульса составляет от 1 до 2 миллисекунд. При этом, длительность 1 миллисекунды соответствует минимальному положению, а 2 миллисекунды — максимальному.
Для установки сервопривода в нужное положение необходимо подключить его к питанию и установить непосредственно управляющий сигнал. При этом, важно учитывать, что сервоприводы могут потреблять больше тока, если устанавливать их в крайнее положение. Поэтому, для управления несколькими сервоприводами, может потребоваться использование внешнего источника питания.
Одной из наиболее распространенных библиотек, используемых для работы с сервоприводами, является Servo.h для Arduino и RPIO.PWM для Raspberry Pi. Эти библиотеки позволяют управлять сервоприводами с помощью простых команд и предоставляют возможность настройки различных параметров, таких как диапазон перемещения и скорость движения.
При использовании сервоприводов нужно также учитывать проблему износа моторов. Постоянное использование сервопривода может привести к истощению мотора и выходные характеристики изнашиваются со временем. Чтобы увеличить срок службы редуктора мотора, следует правильно настроить алгоритм модуляции ширины импульса, который посылает управляющей схеме сервопривода.
Управление сервоприводами также может быть реализовано с использованием альтернативных библиотек, таких как VirtualWire или Servo, которые позволяют передавать управляющие сигналы по беспроводному каналу. Это особенно полезно, если требуется управлять сервоприводом на большом расстоянии.
В итоге, настройка сервоприводов требует определенных знаний и навыков. Однако, благодаря разнообразию доступных библиотек и примеров работы, овладеть этими навыками можно довольно быстро. Главное — понять основные характеристики сервоприводов и научиться управлять ими эффективно.
Технические аспекты сервоприводов
Основным преимуществом сервоприводов является возможность использования положения и скорости входного сигнала для управления положением ротора. Библиотека Servo2 для Arduino mega позволяет подключать до 48 сервоприводов, и использует модуляцию длительности импульсов для управления моментом и скоростью вращения моторов.
При подключении сервоприводов к Arduino mega ограничение зависит от питания и тока, поэтому важно использовать адекватный источник питания. Обычно в сервоприводы подается постоянное напряжение, а также сигнал управления.
Для положения сервоприводов можно использовать либо вал с редуктором, либо ротор бесколлекторного мотора. Внутренний выбор мотора зависит от типа сервопривода, и многие сервоприводы имеют разные типы моторов.
Одни сервоприводы имеет только ротор мотора, и управление осуществляется через фазный контроллер. Другие сервоприводы имеют и ротор, и редуктор, и обратную связь сервопривода постоянного тока. В зависимости от типа сервопривода можно использовать разные примеры подключения и управления.
Мощность сервопривода зависит от крутящего момента и скорости вращения ротора. Некоторые сервоприводы могут вращаться быстрее, чем другие, поэтому важно выбрать сервопривод с подходящей скоростью и моментом.
Сервоприводы могут быть подключены с помощью обратной связи, чтобы получить точное положение ротора. Это особенно полезно при использовании точного управления положением и скоростью.
Некоторые примеры использования сервоприводов включают в себя управление роботами, моделями и автоматизацию. Также сервоприводы могут быть использованы для управления положением ступеней и других подобных механизмов.
Сервоприводы могут быть подключены к Arduino mega с использованием библиотеки Servo2 или альтернативной библиотеки, такой как VirtualWire. Обычно выходной сигнал подается на шлейф сервопривода, который посылает сигнал на управление мотором и определение положения.
Время реакции сервопривода на сигнал управления зависит от длительности импульса, который называют также длительностью импульса. Чтобы управлять сервоприводом с Arduino mega, необходимо использовать шаблон следующей схемы:
- Подключите питание сервопривода к источнику питания Arduino mega.
- Подключите выходной сигнал от Arduino mega к шлейфу сервопривода.
- Используйте библиотеку Servo2 или альтернативную библиотеку для управления сервоприводом.
Интерфейс управления
Одним из основных элементов управления сервоприводом является длительность импульса, который задается алгоритмом управления. Arduino может генерировать сигналы с нужной длительностью для управления сервоприводом.
Сервоприводы обычно имеют ограничение по диапазону положений, в которых они могут перемещаться. Например, сервопривод может иметь диапазон вращения от 0 до 180 градусов или от -90 до 90 градусов. В зависимости от выбранного сервопривода, эти ограничения могут быть разными.
Управление сервоприводом может быть осуществлено с помощью различных методов. Наиболее распространенными являются использование аппаратного PWM или использование модуляции ширины импульса (PWM) с соответствующей частотой и длительностью импульсов.
Управление сервоприводом при помощи Arduino
Для управления сервоприводами с помощью Arduino можно использовать специальную библиотеку Servo. Она предоставляет удобный интерфейс для работы с сервоприводами и позволяет устанавливать конкретные положения и скорость вращения. Пример кода:
#includeServo servo; void setup() { servo.attach(9); // Подключение сервопривода к пину 9 } void loop() { servo.write(90); // Установка сервопривода в положение 90 градусов delay(1000); // Задержка 1 секунда servo.write(0); // Установка сервопривода в положение 0 градусов delay(1000); // Задержка 1 секунда }
Управление сервоприводом с помощью Raspberry Pi
Для управления сервоприводами с помощью Raspberry Pi можно использовать различные библиотеки и фреймворки, такие как pigpio и RPi.GPIO. Пример кода:
import pigpio pi = pigpio.pi() pi.set_servo_pulsewidth(17, 1500) # Установка положения сервопривода pi.stop() # Отключение pigpio
С помощью этих методов можно управлять одним или несколькими сервоприводами в зависимости от выбора их количества и управляющей платформы.
Некоторые сервоприводы могут иметь дополнительные характеристики, такие как больший момент вращения, использование сервоприводов с редуктором или сервоприводов с электромотором без сердечника. Также существуют сервоприводы с различным форм-фактором и материалы изготовления, что позволяет выбрать оптимальный сервопривод для конкретной задачи.
| Модель сервопривода | Характеристики | Примеры подключения |
|---|---|---|
| Servo1 | Диапазон положений: 0-180 градусов Скорость вращения: 0.1 сек/60 градусов | Arduino: пин 9 Raspberry Pi: пин 17 |
| Servo2 | Диапазон положений: -90-90 градусов Скорость вращения: 0.2 сек/60 градусов | Arduino: пин 10 Raspberry Pi: пин 18 |
Видео:
servo sg90 Подключение серво и управление с телефона
servo sg90 Подключение серво и управление с телефона by Ардуино для начинающих 5,431 views 2 years ago 7 minutes, 34 seconds