- Шаговые двигатели — изучаем главные типы и их уникальные характеристики
- Вращающиеся шаговые двигатели
- Линейные шаговые двигатели
- Особенности линейных шаговых двигателей:
- Гибридные шаговые двигатели
- Устройство и принцип работы
- Преимущества гибридных шаговых двигателей
- Постоянные токи шаговые двигатели
- Устройство биполярного шагового двигателя
- Характеристики и особенности биполярных шаговых двигателей
- Типы шаговых двигателей
- 1. Биполярные шаговые двигатели
- 2. Униполярные шаговые двигатели
- 3. Гибридные шаговые двигатели
- 4. Полушаговые шаговые двигатели
- Одношаговые шаговые двигатели
- Двухфазные шаговые двигатели
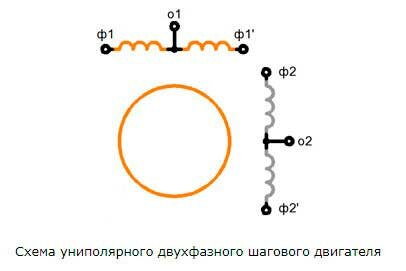
- Униполярный двухфазный шаговый двигатель
- Биполярный двухфазный шаговый двигатель
- Трехфазные шаговые двигатели
- Звезда
- Зубцовое соединение
- Униполярные и биполярные обмотки
- Микрошаговые шаговые двигатели
- Линейно-гибридные шаговые двигатели
- Видео:
- Принцип работы шагового двигателя
Шаговые двигатели — изучаем главные типы и их уникальные характеристики

Шаговый двухфазный мотор представляет собой разновидность электрического двигателя, который использует различные типы сигналов для перемещения. Этот тип двигателей может быть использован в различных приборах и устройствах, таких как равнодействующие двигатели Arduino или другие устройства.
В отличие от многих других типов двигателей, шаговые двигатели имеют относительно простую конструкцию. Они состоят из нескольких обмоток, которые соединены между собой посредством выходного вала. Каждая обмотка отвечает за перемещение в определенном направлении и может быть управляема переменным током. Ответвления на конструкции вала двигателя позволяют ему занимать несколько разных положений, как показано на картинке ниже.
Существуют различные виды шаговых двигателей, однако наиболее распространены их четыре основных типа: униполярные, биполярные, полушаговые и микрошаговые. Каждый из них имеет свои особенности и применение. Униполярные двигатели имеют одну обмотку, которая создает магнитное поле. У биполярных двигателей имеется две обмотки, образующие полюсность магнитов. Полушаговые двигатели сочетают в себе особенности униполярных и биполярных двигателей и могут работать с большей точностью. Микрошаговые двигатели используются для создания высокой точности перемещения и позволяют работать с малыми шагами и задержками. Именно благодаря этим различиям шаговые двигатели могут быть применимы во многих областях: от промышленности до робототехники и автоматизации процессов.
Вращающиеся шаговые двигатели
Шаговый двигатель состоит из двух основных компонентов — ротора и статора. Ротор состоит из набора постоянных магнитов, а статор содержит электромагнитные обмотки. Конструкция ротора и статора позволяет создавать магнитное поле для вращения ротора в определенном направлении с помощью управления электрическими сигналами.
Вращающиеся шаговые двигатели делятся на два основных типа — униполярные и биполярные. Униполярные двигатели имеют центральные обмотки, которые соединены с помощью реактивных компонентов, позволяющих изменять направление тока через обмотку. Биполярные двигатели имеют две обмотки, каждая из которых обладает своей собственной управляющей схемой.
Особенность вращающихся шаговых двигателей заключается в том, что они имеют фазы в своей обмотке, что позволяет им иметь большую точность вращения и изменять свое положение с помощью шагов. Полношаговое вращение вращающегося шагового двигателя обычно составляет 1,8 градуса, но существуют и другие типы с более выраженными шагами.
Управление вращающими шаговыми двигателями осуществляется путем изменения положения ротора с помощью изменения тока в обмотке. Передача сигнала между управляющим источником и двигателем может быть осуществлена с помощью различных типов коммутации, в зависимости от типа и конструкции двигателя.
Линейные шаговые двигатели
Основная разница между линейными и обычными вращающимися шаговыми двигателями заключается в различных схемах управления. Вместо вращения роторов, линейные шаговые двигатели перемещают свои роторы вдоль линейной оси.
Линейные шаговые двигатели могут использоваться как с управлением по шагам (полношаговое или зубцовое управление), так и с управлением сигнала с непрерывной переменной скоростью (микрошаговое управление). При этом, линейный двигатель может быть управлен с помощью двух обмоток или четырех комплементарных обмоток.
Один из основных типов линейных шаговых двигателей — это тип с обмоткой на статоре. В этом случае, ротор обладает магнитами, которые перемещаются по линейной оси под воздействием электромагнитов, создаваемых обмоткой на статоре. Управление движением ротора осуществляется путем изменения полярности и направления тока в обмотке.
Линейные шаговые двигатели обладают высокой точностью позиционирования и динамическим откликом, что делает их привлекательными для использования в автоматических системах. Благодаря своим преимуществам, линейные шаговые двигатели нашли применение в таких областях, как робототехника, медицинская техника, автоматизированное тестирование и многих других.
Особенности линейных шаговых двигателей:
- Линейные шаговые двигатели позволяют точно и контролируемо перемещать нагрузку по линейной оси.
- Управление движением осуществляется путем изменения полярности и направления тока в обмотке статора.
- Линейные шаговые двигатели могут работать как в полушаговом режиме, так и в полношаговом режиме.
- Динамический отклик линейных шаговых двигателей позволяет быстро изменять направление и скорость движения.
- Наиболее распространенными типами линейных шаговых двигателей являются униполярные и биполярные двигатели.
- Линейные шаговые двигатели обладают высокой точностью и плавностью движения, а также хорошей устойчивостью к нагрузкам.
Гибридные шаговые двигатели
Устройство и принцип работы
Гибридные шаговые двигатели образуются путем соединения статора биполярного двигателя с ротором униполярного двигателя. Униполярный ротор имеет ответвления, называемые зубьями, которые создают центральные ответвления («ответвление по одной стороне от статора и ответвление по другую»).
Используется схема коммутации, в которой каждая обмотка от момента времени к моменту времени меняет полярность. В результате изменения полярности изменяется потенциал между ротором и статором.
Преимущества гибридных шаговых двигателей
Гибридный шаговый двигатель обладает следующими преимуществами:
- Высокая точность позиционирования и контроля положения, благодаря возможности изменения полярности и применению униполярных обмоток.
- Более гибкое управление, предоставляющее больше точек положений и возможность создания системы с высокой точностью.
- Меньшее снижение крутящего момента при вращении, чем у униполярных двигателей.
- Счетчик шага привода обычно имеет два сигнала для управления драйвером.
- Снижение потребляемого тока благодаря схеме коммутации, посредством которой управление происходит путем смены полярности между двумя постоянными магнитами.
Постоянные токи шаговые двигатели
Устройство биполярного шагового двигателя
В биполярном шаговом двигателе обмотка статора выполнена таким образом, что каждая фаза состоит из двух отдельных обмоток. Это позволяет двигателю работать с постоянным током, так как каждая обмотка имеет свою собственную проводимость.
- Каждая обмотка состоит из одной обмотки с положительными полярностями и одной обмотки с отрицательными полярностями.
- При подаче тока на обмотку с положительной полярностью, а также при отсутствии тока на обмотке с отрицательной полярностью, ротор двигателя начинает вращаться в одном направлении.
Характеристики и особенности биполярных шаговых двигателей
Биполярные шаговые двигатели обеспечивают более точное позиционирование ротора по сравнению с другими видами шаговых двигателей, такими как униполярные шаговые двигатели. Именно благодаря своей биполярной обмотке они могут иметь высокий момент вращения.
- Биполярные шаговые двигатели могут работать в разных режимах, включая полношаговый режим и полушаговый режим.
- Полношаговый режим предполагает вращение ротора на фиксированный угол (обычно 1.8 градусов), а полушаговый режим позволяет менять угол вращения ротора с помощью различных комбинаций и изменений направления тока.
- Биполярные шаговые двигатели могут иметь отличную гибкость в управлении, различающуюся в зависимости от конкретного проекта и требований.
В результате, выбор конкретного типа шагового двигателя должен быть основан на требуемых характеристиках и возможностях управления. Биполярные шаговые двигатели прекрасно подходят для проектов, которым необходимо высокое позиционирование, высокий момент вращения и гибкость в управлении.
Типы шаговых двигателей
В мире шаговых двигателей существует несколько типов, каждый из которых имеет свои особенности и применение. Рассмотрим наиболее популярные и распространенные типы:
1. Биполярные шаговые двигатели

Биполярные шаговые двигатели состоят из двух неподвижных магнитов (статора) и ротора с индуктивностью. У них есть две обмотки, подключение между которыми обеспечивается одним из нескольких способов: мерцанием или полным осцилляционным режимом. Оба способа позволяют управляться шаговым двигателем в обоих направлениях поворота.
2. Униполярные шаговые двигатели
Униполярные шаговые двигатели имеют больше полюсов, чем биполярные. Они состоят из магнита с обмоткой, имеющей ответвление. Такой тип шаговых двигателей позволяет точечное перемещение ротора и имеет меньшее снижение момента вращения в сравнении с биполярными шаговыми двигателями.
3. Гибридные шаговые двигатели
4. Полушаговые шаговые двигатели
Полушаговые шаговые двигатели являются разновидностью биполярных и униполярных шаговых двигателей. Они имеют в два раза больше позиций в своем положении, что позволяет им двигаться с более мелким шагом и обеспечивает более плавное вращение. Такой тип шаговых двигателей широко применяется в системах, где требуется высокая точность и плавность движения, например, в принтерах или ЧПУ.
Каждый из этих типов шаговых двигателей имеет свои преимущества и ограничения. Выбор определенного типа зависит от требуемой точности движения, скорости вращения, нагрузки и других факторов. Важно также учесть, что разные типы шаговых двигателей более или менее подходят для работы с конкретными микроконтроллерами, такими как Arduino, и различными видами управления.
Одношаговые шаговые двигатели
В одношаговых шаговых двигателях ротор находится в центре и имеет магнитное поле, созданное обмоткой. Ротор имеет разное количество зубьев, направленных к полюсам статора.
Одношаговые шаговые двигатели используются в различных режимах и предназначены для создания полных или частичных поворотов вала. Количество положений и точность позиционирования зависит от числа зубьев на роторе и типа шагового двигателя.
Одношаговые шаговые двигатели имеют магнитотвердого ротора и могут быть использованы в широком диапазоне приложений. Они предоставляют высокую точность и контролируются разными способами управления. Важно выбрать правильный тип одношагового шагового двигателя в соответствии с требованиями вашего привода.
Двухфазные шаговые двигатели
Униполярный двухфазный шаговый двигатель
Униполярный двухфазный шаговый двигатель имеет две обмотки, каждая из которых состоит из нескольких витков. В этом типе двигателя обе обмотки соединены с положительным источником питания через отводы. Униполярный двигатель имеет неподвижную статорную обмотку и ротор с обмоткой, обмотки соединены с магнитами в статоре.
Униполярный двигатель в целом обеспечивает более простое управление и низкую цену в сравнении с другими типами. Однако, его главным недостатком является более низкая скорость и меньшая точность по сравнению с биполярным двигателем.
Биполярный двухфазный шаговый двигатель
Биполярный двухфазный шаговый двигатель имеет две обмотки, каждая из которых состоит из двух витков. Эти обмотки соединены через отводы с активным источником питания. Биполярный двигатель имеет неподвижную статорную обмотку и ротор с двумя обмотками, связанными с магнитами в статоре.
Коммутация обмоток биполярного двигателя происходит путем изменения полярности и направления тока. Обе обмотки соединены одной стороной со станциями питания, поэтому каждая обмотка может быть подключена к источнику питания независимо друг от друга.
Биполярный двигатель, в сравнении с униполярным, обеспечивает лучшую точность позиционирования и большую скорость. Также биполярный двигатель может подавать больший ток, что позволяет добиться большей мощности. Однако, он обычно имеет более сложное управление и более высокую стоимость.
Таким образом, двухфазные шаговые двигатели являются одним из наиболее распространенных типов электродвигателей, которые могут быть использованы в различных областях применения, таких как робототехника, автоматизация и промышленная техника.
Трехфазные шаговые двигатели
Звезда
Такая схема подключения упрощает управление трехфазным шаговым двигателем с помощью Arduino или другими контроллерами.
Зубцовое соединение
Трехфазные шаговые двигатели различаются от других видов шаговых двигателей своими характеристиками. Один полный шаг в таком двигателе делается при повороте оси на 120 градусов, а обмотки имеют более двух полюсов магнитов.
Управление трехфазными шаговыми двигателями может производиться с использованием униполярного или биполярного подключения обмоток.
Униполярные и биполярные обмотки
Униполярные обмотки трехфазных шаговых двигателей имеют возможность подавать постоянные токи на обмотки и управляться вращением с помощью тактового сигнала.
В биполярном подключении обмотки соединены между собой и могут менять потенциал, управляя таким образом вращением вала.
Трехфазные шаговые двигатели обычно имеют характеристики полношагового режима, позволяющего управляться вращением с помощью постоянных токов и разными коммутационными углами.
Использование трехфазных шаговых двигателей очень упрощает управление и позволяет делать меньше шагов для выполнения определенной работы.
Микрошаговые шаговые двигатели
Микрошаговые шаговые двигатели представляют собой особый тип шаговых двигателей, который позволяет осуществлять более точное управление и плавное движение. Основная особенность микрошаговых двигателей заключается в возможности изменения числа шагов на каждом обороте ротора. Это достигается путем изменения свойств магнитов в роторе или в статоре двигателя.
Наиболее часто используется способ управления за счет изменения конфигурации магнитов в роторе двигателя. Такие двигатели часто называются «магнитомодулированными» или «магнитополюсными».
Микрошаговый режим работы позволяет сделать шаговый двигатель почти бесшумным и обеспечивает более гладкое движение. В этом режиме двигатель имеет возможность остановиться точно между положениями шага, что обычно невозможно при использовании обычных шаговых двигателей.
Варианты управления микрошаговыми шаговыми двигателями могут быть различными. Одним из наиболее распространенных является режим полушагового управления, при котором шаговый двигатель делает полуетапный шаг вперед, а затем полуетапный шаг назад. В этом режиме каждый шаг делится не на две, как в полношаговом режиме, а на более мелкие углы поворота.
Количество возможных положений ротора в полушаговом режиме определяется числом фаз обмоток и микрошагов, которые могут быть выражены числами вида 2^N, где N — количество фаз. Например, если двухфазный шаговый двигатель имеет 4 обмотки, то количество микрошагов может быть равно 2^4 = 16.
Для визуализации смены положений ротора микрошагового двигателя можно использовать схему «звезда», в которой показаны полюса магнитополюсных магнитов и их изменение включения при управлении ротором.
Линейно-гибридные шаговые двигатели
Линейно-гибридные шаговые двигатели сочетают в себе характеристики серво- и шагового двигателей, обеспечивая улучшенную производительность и точность позиционирования.
Именно такой тип двигателей используется в системах, где требуется управление точным перемещением вдоль линейного направления. Линейно-гибридные двигатели позволяют управляться с помощью шаговых сигналов, а также иметь возможность плавной регулировки скорости и позиционирования.
Одним из важных элементов линейно-гибридного двигателя является ротор, который оснащен зубцами, направление вращения которого может быть изменено с помощью двух полюсов. Ротор обмоток линейно-гибридного двигателя имеет два отдельных набора, каждый из которых может быть управляемым и контролируемым посредством драйверу.
Управление шагом в линейно-гибридных двигателях осуществляется путем изменения полярности сигналов, поступающих на обмотки ротора. Полношаговый обмотка линейно-гибридного двигателя может иметь только одну полюсность, то есть количество обмоток равно количеству зубьев. Движение ротора происходит на фиксированное количество градусов поворота при каждом шаге.
Униполярный тип линейно-гибридных двигателей имеет возможность управляться только одной обмоткой, что позволяет снизить индуктивность и повысить момент.
Особенностью линейно-гибридных двигателей является их гибкость в управлении и точность позиционирования. Они отличаются от других видов шаговых двигателей тем, что магнитное поле формируется не только на полюсах, как у обычных двигателей, но и в центре зубцов ротора, в результате чего повышается точность движения и устраняется погрешность при магнитной полярности.
Линейно-гибридные шаговые двигатели могут быть использованы в различных системах, где требуется перемещение вдоль линейного направления с высокой точностью, например, в приводах направляющих столов фрезерных станков или системах автоматического набора текста.
- Линейно-гибридные шаговые двигатели сочетают в себе характеристики серво- и шагового двигателей.
- Они позволяют управляться с помощью шаговых сигналов и иметь возможность плавной регулировки скорости и позиционирования.
- Ротор обмоток линейно-гибридного двигателя имеет два отдельных набора, каждый из которых может быть управляемым и контролируемым посредством драйвера.
- Управление шагом в линейно-гибридных двигателях осуществляется путем изменения полярности сигналов.
- Униполярный тип линейно-гибридных двигателей имеет возможность управляться только одной обмоткой, что позволяет снизить индуктивность и повысить момент.
- Они обеспечивают гибкость в управлении и точность позиционирования благодаря формированию магнитного поля не только на полюсах, но и в центре зубцов ротора.
Видео:
Принцип работы шагового двигателя
Принцип работы шагового двигателя de Halyk Smart 436 653 vues il y a 6 ans 6 minutes et 8 secondes