- Скольжение асинхронного двигателя — ключевой параметр для понимания работы мощного устройства, обеспечивающего эффективную передачу энергии
- Понятие и принцип работы асинхронного двигателя
- Скольжение (s) = (f1 — f2) / f1
- Структура асинхронного двигателя и его основные элементы
- Электрические и магнитные взаимодействия в асинхронном двигателе
- Понятие скольжению асинхронного двигателя
- Формула для расчета скольжения
- Принцип работы асинхронного двигателя в режиме номинальной мощности
- Пример использования фазосдвигающего устройства
- Применение фазосдвигающего устройства для управления скоростью двигателя
- Принцип работы асинхронного двигателя в режиме перегрузки
- Принцип работы асинхронного двигателя в режиме холостого хода
- Ограничения при пуске
- Регулировка скорости вращения
- Величина скольжения в разных режимах работы асинхронного двигателя
- Зависимость величины скольжения от режима работы и нагрузки
- Видео:
- АСИНХРОННЫЙ двигатель, принцип работы и строение, простыми словами. (ТРЕХФАЗНЫЙ).
Скольжение асинхронного двигателя — ключевой параметр для понимания работы мощного устройства, обеспечивающего эффективную передачу энергии

Асинхронный двигатель является самым распространенным типом электродвигателя, который используется в различных областях промышленности. Главным преимуществом асинхронных двигателей является их простота и надежность в работе. Принцип работы такого двигателя основывается на взаимодействии магнитных полей между статором и ротором.
Работа асинхронного двигателя включает в себя два основных типа движений: пусковое и номинальное. Пусковое движение происходит в результате установления магнитного поля в рабочей обмотке статора. Это поле возникает при подключении трехфазного напряжения к соответствующим подключениям статора.
Во время пуска, ротор двигателя еще не начал вращаться. При этом, ротор является короткозамкнутым проводником, что создает токи короткого замыкания и ограничивает крутящий момент. После пуска, ротор начинает ускоряться и двигаться вращающимся направлении под воздействием магнитного поля статора.
Однако, в режиме номинальной работы асинхронного двигателя, возникает явление, известное как скольжение. Скольжение определяется как разница между частотой вращения поля статора и частотой вращения ротора. Эта разница обусловлена потерями энергии, связанными с магнитным полем и сопротивлением вторичных проводников. Скольжение также влияет на мощность и энергоэффективность работы двигателя.
Управление скольжением асинхронного двигателя может быть осуществлено путем изменения частотных параметров, таких как напряжение и частота питающей сети. Это позволяет регулировать скорость вращения ротора и обеспечивать оптимальную работу двигателя в зависимости от требований производства.
Понятие и принцип работы асинхронного двигателя
Принцип работы асинхронного двигателя основан на явлении скольжения, которое возникает при разности частотных параметров подаваемого на статор переменного тока и частоты вращения ротора. Скольжение определяется как отношение разности между частотами к частоте подаваемого на статор электрического тока. Выражается формулой:
Скольжение (s) = (f1 — f2) / f1
Где f1 — частота подаваемого на статор электрического тока, f2 — частота вращения ротора.
При пуске асинхронного двигателя требуется преодолеть значения скольжения, близкие к нулю. Для этого применяются различные способы пуска двигателя, такие как использование пускающих устройств или регулировка частоты подаваемого тока.
Одной из основных частей асинхронного двигателя является статор. Он состоит из трехфазной обмотки, которая обычно соединяется по схеме звезда или треугольник. Через обмотку статора подается питающее напряжение переменного тока.
Ротор, вторая часть двигателя, представляет собой вращающееся соединения обмоток, которые формируют магнитное поле. При изменении частоты подаваемого тока на статор, происходит изменение скольжения и магнитного поля ротора. В результате этого возникает разность между магнитными потоками статора и ротора, что приводит к появлению электродвижущей силы и потери мощности.
Таким образом, асинхронный двигатель является самым распространенным типом электродвигателя, используемого в промышленности. Его принцип работы основан на явлении скольжения и изменении магнитного поля ротора. Регулировка скорости работы асинхронного двигателя может быть осуществлена путем ограничения скольжения и изменения частоты подаваемого на статор тока.
Структура асинхронного двигателя и его основные элементы
- Ротор — это часть двигателя, которая вращается и приводит в движение рабочий механизм. Ротор обычно состоит из стержней, соединенных с кольцами, что позволяет его вращению.
- Статор — это другая часть двигателя, которая окружает ротор и имеет обмотку. Обмотка статора подключена к источнику питания и создает магнитное поле, которое взаимодействует с ротором, заставляя его вращаться.
- Обмотка статора — это обмотка, которая находится внутри статора и состоит из нескольких фазных обмоток, обычно обозначаемых буквами A, B, C или числами 1, 2, 3. Эти обмотки подключены в схеме звездой или треугольником и питаются от источника переменного тока.
- Преобразователь частоты пуска — это устройство, которое управляет скоростью вращения двигателя путем изменения частоты питающего его напряжения. С помощью преобразователя частоты пуска можно управлять скольжением, что позволяет достичь разных скоростей вращения двигателя.
- Пускатель — это устройство, которое позволяет запустить двигатель с максимально возможной скоростью. Оно основано на принципе фазосдвигающего устройства, которое изменяет фазу подаваемого питания для создания максимально возможного начального момента.
- Сопротивления пусковых обмоток — это добавочные элементы в схеме двигателя, которые создаютсопротивление при старте. Это позволяет достичь более высокой начальной мощности и ускорения.
Структура асинхронного двигателя подбирается таким образом, чтобы обеспечить оптимальные характеристики работы и эффективность. Он работает на основе принципа скольжения, который зависит от разности скорости ротора и скорости вращающего поля статора. Скольжение является линейным отншением разности этих скоростей к скорости вращения поля статора.
Электрические и магнитные взаимодействия в асинхронном двигателе
Пуск асинхронного двигателя осуществляется путем создания трехфазного переменного напряжения на его статоре. При подаче напряжения, обмотки статора создают магнитные поля, которые начинают вращаться вокруг ротора. Ротор двигается с определенной скоростью, но всегда немного меньше скорости вращения магнитного поля статора.
Зависимость скорости ротора от скорости вращения магнитного поля статора выражается через понятие скольжения. Скольжение определяется как отношение разницы скоростей ротора и магнитного поля статора к скорости магнитного поля статора. Когда скорость ротора равна скорости магнитного поля статора, скольжение равно нулю и двигатель работает в синхронном режиме.
При пуске асинхронного двигателя требуется создание пускового момента, который зависит от магнитного поля и сопротивления элемента нагрузки. Пусковой момент создается путем подключения двигателя к трехфазной сети через пускатели. Номинальное напряжение сети превышает напряжение на обмотках статора, что приводит к появлению разности фаз между токами подключаемых вторичных витков.
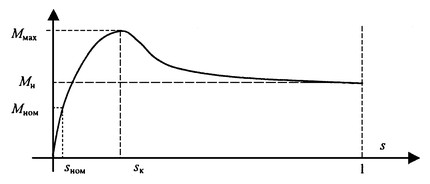
Обратно зависимость напряжения и скорости магнитного поля статора относительно ротора составляет трехфазное фазосдвигающего напряжение. При увеличении магнитного поля в статоре возрастает и момент, возникающий на роторах двигателя. Это означает, что момент двигателя будет возрастать при увеличении скольжения, пока не достигнет своего максимального значения.
Когда двигатель работает в пределах скольжения от нуля до максимального значения, мощность, потребляемая из сети, меньше, чем мощность, выведенная на валу двигателя. Это явление называется регулированием скольжения, и оно позволяет двигателю работать с меньшим электрическим режимом при пуске и нагрузке.
Таким образом, электрические и магнитные взаимодействия в асинхронном двигателе играют важную роль в его работе и позволяют ему пускаться, разгоняться и работать в определенных режимах при изменении нагрузки.
Понятие скольжению асинхронного двигателя
Асинхронные электродвигатели работают на основе принципа скольжения. Суть этого принципа заключается в наличии разницы между частотой вращения ротора и полем магнитного поля статора.
Статор асинхронного двигателя имеет обмотку, подключенную к источнику питания переменного напряжения. Под действием этого напряжения в проводниках обмотки статора возникает вихревое магнитное поле.
Когда асинхронный двигатель находится в режиме пуска или нагрузки, ротор вращается вокруг своей оси. Вращение ротора приводит к изменению магнитного поля в статоре, что в свою очередь создает электромагнитные силы на стержнях ротора.
Если асинхронный двигатель работает в режиме пуска или нагрузки, то между обмотками статора и ротора будет существовать разница во фазных осиляциях. Данное отставание вызывает изменение поля обмоток статора, что ведет к возникновению скольжения.
Скольжение определяет разницу между частотой вращения ротора и частотой поля статора. Описанное изменение электромагнитного поля приводит к изменению момента мощности на выходе асинхронного двигателя.
Формула для расчета скольжения
Формула для расчета скольжения выглядит следующим образом:
S = (Nсинх — Nр) / Nсинх
Где:
- S — скольжение;
- Nсинх — синхронная частота вращения;
- Nр — рабочая частота вращения.
Скольжение можно рассчитать, зная значения синхронной и рабочей частот вращения. Синхронная частота вращения определяется по формуле:
Nсинх = (120 * f) / p
Где:
- f — частота сети;
- p — число полюсов двигателя.
Рабочая частота вращения определяется в результате работы двигателя и может быть измерена с помощью специальных сенсоров или вычислена на основе других параметров.
Зная значения синхронной и рабочей частот вращения, можно рассчитать скольжение, которое является важным параметром для определения эффективности работы двигателя и его скорости вращения. По значению скольжения можно судить о том, насколько эффективно используется мощность двигателя и какая часть его мощности тратится на преодоление сопротивления, создаваемого нагрузкой.
Важно отметить, что скольжение может изменяться в зависимости от условий работы и нагрузки. Для разных типов двигателей и схем управления могут использоваться разные формулы и методы расчета скольжения. Точный расчет скольжения требует учета множества факторов и может быть сложной задачей.
Принцип работы асинхронного двигателя в режиме номинальной мощности
Асинхронный двигатель может работать в режиме номинальной мощности, когда на его статорную обмотку подается трехфазное напряжение с определенным фазным сдвигом. В этом режиме двигатель работает синхронно с частотой питающего напряжения. Применение фазосдвигающего элемента позволяет контролировать скорость вращения двигателя.
Для запуска асинхронного двигателя в режиме номинальной мощности необходимо подать на его статорную обмотку трехфазное напряжение с заданным фазным сдвигом. Запуск двигателя происходит при нулевой скорости вращения ротора. При начале работы двигателя происходит пространственное обминание магнитного поля между статором и ротором, в результате чего возникает крутящий момент.
В режиме номинальной мощности асинхронный двигатель работает с постоянной частотой питающего напряжения. При увеличении нагрузки на двигатель, его скорость уменьшается, что приводит к увеличению разности хода между магнитным полем статора и ротора. Это приводит к увеличению электромагнитной силы воздействия на ротор и увеличению крутящего момента.
Управление скоростью работы асинхронного двигателя в режиме номинальной мощности осуществляется путем изменения фазового сдвига питающего напряжения. Для этого используется фазосдвигающее устройство, которое добавляет к фазному напряжению сопротивление, изменяющее фазовый сдвиг. При увеличении фазового сдвига, скорость двигателя уменьшается, а при уменьшении фазового сдвига, скорость двигателя увеличивается.
Пример использования фазосдвигающего устройства
Вариантом фазосдвигающего устройства является использование трехфазного параллельного резистора или реактора. При подключении резистора или реактора в одну из фазных обмоток статора, происходит увеличение сопротивления этой обмотки. Это приводит к увеличению фазного сдвига между фазными напряжениями, подводимыми к статору, и соответственно уменьшению скорости двигателя.
Применение фазосдвигающего устройства для управления скоростью двигателя
Однако стоит отметить, что такой способ управления скоростью двигателя имеет свои ограничения. Во-первых, при использовании резистора или реактора возникают потери энергии в виде тепла. Во-вторых, изменение значения фазового сдвига ограничено допустимыми пределами работы двигателя.
| Положение обмоток статора | Звезда | Треугольник |
|---|---|---|
| Результат | Увеличение скорости вращения двигателя | Уменьшение скорости вращения двигателя |
- Режим номинальной мощности асинхронного двигателя позволяет работать на постоянной частоте питающего напряжения.
- Фазосдвигающее устройство используется для управления скоростью работы двигателя в режиме номинальной мощности.
- Подключение резистора или реактора позволяет изменять фазный сдвиг и скорость двигателя.
- Ограничениями данного способа управления являются потери энергии и допустимые пределы значения фазового сдвига.
Принцип работы асинхронного двигателя в режиме перегрузки
Принцип работы асинхронного двигателя основан на вращении магнитного поля статора, создаваемого трехфазным питающим напряжением. В схеме подключения обмоток статора между собой используется соединение по схеме «звезда» или «треугольник», в зависимости от конструкции двигателя.
Во время пускового момента, магнитное поле создаваемое статором вызывает движение ротора, которое управляется вращением подводимого питающего напряжения и изменением магнитного поля статора. Заметить можно, что в режиме перегрузки обмотка ротора может оказаться короткозамкнутым, что вызывает появление в ней высоких асинхронных токов.
Регулировка момента вращения асинхронного двигателя в режиме перегрузки осуществляется с помощью трехфазного фазосдвигающего устройства. Путем изменения временем подачи питающего напряжения на каждую обмотку статора, можно изменять магнитное поле, создаваемое электрическим током в обмотках, и тем самым контролировать момент вращения двигателя.
В режиме перегрузки асинхронного двигателя, величина создаваемого магнитного поля и момента может изменяться в зависимости от требований нагрузки. Данный принцип работы асинхронного двигателя позволяет достичь высокой эффективности и надежности работы машины в различных условиях использования.
Принцип работы асинхронного двигателя в режиме холостого хода
В режиме холостого хода асинхронный двигатель работает без нагрузки на валу. В этом режиме двигатель имеет скольжение близкое к нулю, то есть разница между скоростью вращения поля и скоростью вращения ротора практически отсутствует.
Принцип работы асинхронного двигателя основан на создании вихревых потоков в роторе. В конструкции двигателя имеется одна обмотка, присоединенная к звезды или треугольником. Эта обмотка обозначается как статорная обмотка. Ротор состоит из разных стержней, которые формируются из проводников и могут быть короткозамкнутыми.
При подаче переменного напряжения и питания, сигнал подается на обмотку двигателя. Магнитное поле, создаваемое обмоткой, вращается вокруг ротора. Поля, создаваемые в роторе и обмотке двигателя, стремятся выровняться и создать магнитное поле, вращающееся по закону электродвигателя.
В режиме холостого хода подводимая на обмотку мощность не создает никакой нагрузки на валу. Поток мощности равен нулю, и двигатель работает без сопротивления. Значения скольжения близки к нулю и скорость вращения ротора практически совпадает со скоростью вращения поля.
Управление асинхронным двигателем в режиме холостого хода осуществляется путем изменения значения потока мощности и скольжения. С помощью регулировки пускового тока и изменения частоты питания можно контролировать скорость вращения.
Ограничения при пуске
Пусковой ток асинхронного двигателя может быть в несколько раз выше его номинального тока. При пуске на двигателе могут возникать высокие токи и магнитное поле, что может привести к нарушениям в работе оборудования.
Регулировка скорости вращения
Регулировка скорости вращения асинхронного двигателя осуществляется с помощью частотного преобразователя, который позволяет изменять частоту питания обмотки двигателя. При изменении частоты питания меняется скольжение и, следовательно, скорость вращения ротора.
Таким образом, асинхронный двигатель работает в режиме холостого хода с минимальным скольжением и отсутствием нагрузки на валу. Управление его скоростью осуществляется путем изменения потока мощности и скольжения с помощью регулировки пускового тока и изменения частоты питания обмотки двигателя.
Величина скольжения в разных режимах работы асинхронного двигателя
В номинальном режиме работы двигатель вращается с постоянными частотой и напряжением второй фазы, что позволяет уравнять разницу фазовых потенциалов и минимизировать скольжение. Величина скольжения в номинальном режиме составляет около 1-2%, что позволяет двигателю работать с максимальной эффективностью и мощностью.
В пусковом режиме работы, когда двигатель только начинает движение, скольжение может достигать значительных значений. Он состоит из двух частей: пусковой пульсации магнитного момента и магнитного момента хода двигателя.
Магнитный момент хода двигателя — это магнитное поле, создаваемое ротором двигателя, который вращается с определенной скоростью и частотой. Это магнитное поле может быть представлено треугольником в графическом виде и создает разные фазовые потенциалы в проводнике. Разница фазовых потенциалов приводит к появлению скольжения.
В пусковом режиме скольжение будет составлять около 5-10% и может достигать высоких значений при некоторых пусковых условиях.
Величину скольжения можно уменьшить путем пуска двигателя звездой, а не треугольником или путем использования частотных преобразователей, которые позволяют изменять частоту и напряжение переменного тока, подаваемого на двигатель.
Зависимость величины скольжения от режима работы и нагрузки
Значение скольжения велико при пуске и уменьшается по мере увеличения скорости вращения ротора. При номинальной нагрузке скольжение асинхронного двигателя варьируется в пределах от 1% до 5%. Относительно полной нагрузки скольжение составляет около 5%.
Значение скольжения зависит от режима работы и величины нагрузки. При пуске двигателя скольжение достигает максимального значения, так как ротор находится в стационарном положении и не вращается на заданной скорости. Далее, по мере набора скорости, скольжение уменьшается.
При полной нагрузке скольжение также равно нулю, так как ротор двигателя совпадает с его номинальной скоростью вращения. Однако, при изменении нагрузки скольжение может возрастать или уменьшаться.
| Скольжение | Состояние двигателя |
|---|---|
| 0% | Двигатель работает с номинальной скоростью и нагрузкой |
| 1-5% | Двигатель работает с частичной нагрузкой |
| более 5% | Двигатель работает с большой нагрузкой |
Скольжение двигателя также может изменяться при регулировке его питания. Если сопротивление обмоток статора увеличивается, то скольжение будет возрастать и двигатель станет асинхронным. Если же сопротивление уменьшается, скольжение также падает и двигатель работает с более высокой эффективностью.
Заметим также, что скольжение асинхронного двигателя зависит от типа соединения его обмоток. При треугольном соединении скольжение будет выше, чем при звездообразном соединении. В свою очередь, линейное скольжение отличается от рабочего и пускового скольжения.
Таким образом, скольжение является важным параметром асинхронного двигателя, определяющим его режим работы и эффективность. Изменение скольжения с помощью регулировки питания и нагрузки позволяет достичь оптимальной работы двигателя в различных условиях.
Для регулировки скольжения асинхронного двигателя могут применяться специальные устройства, такие как пускатели, соединенные с обмотками статора. Эти устройства позволяют изменять эффективность и режим работы двигателя, обеспечивая оптимальную работу в зависимости от требуемой нагрузки.
Видео:
АСИНХРОННЫЙ двигатель, принцип работы и строение, простыми словами. (ТРЕХФАЗНЫЙ).
АСИНХРОННЫЙ двигатель, принцип работы и строение, простыми словами. (ТРЕХФАЗНЫЙ). by CARinfo3d 380,114 views 5 years ago 7 minutes, 57 seconds